正在加载图片...
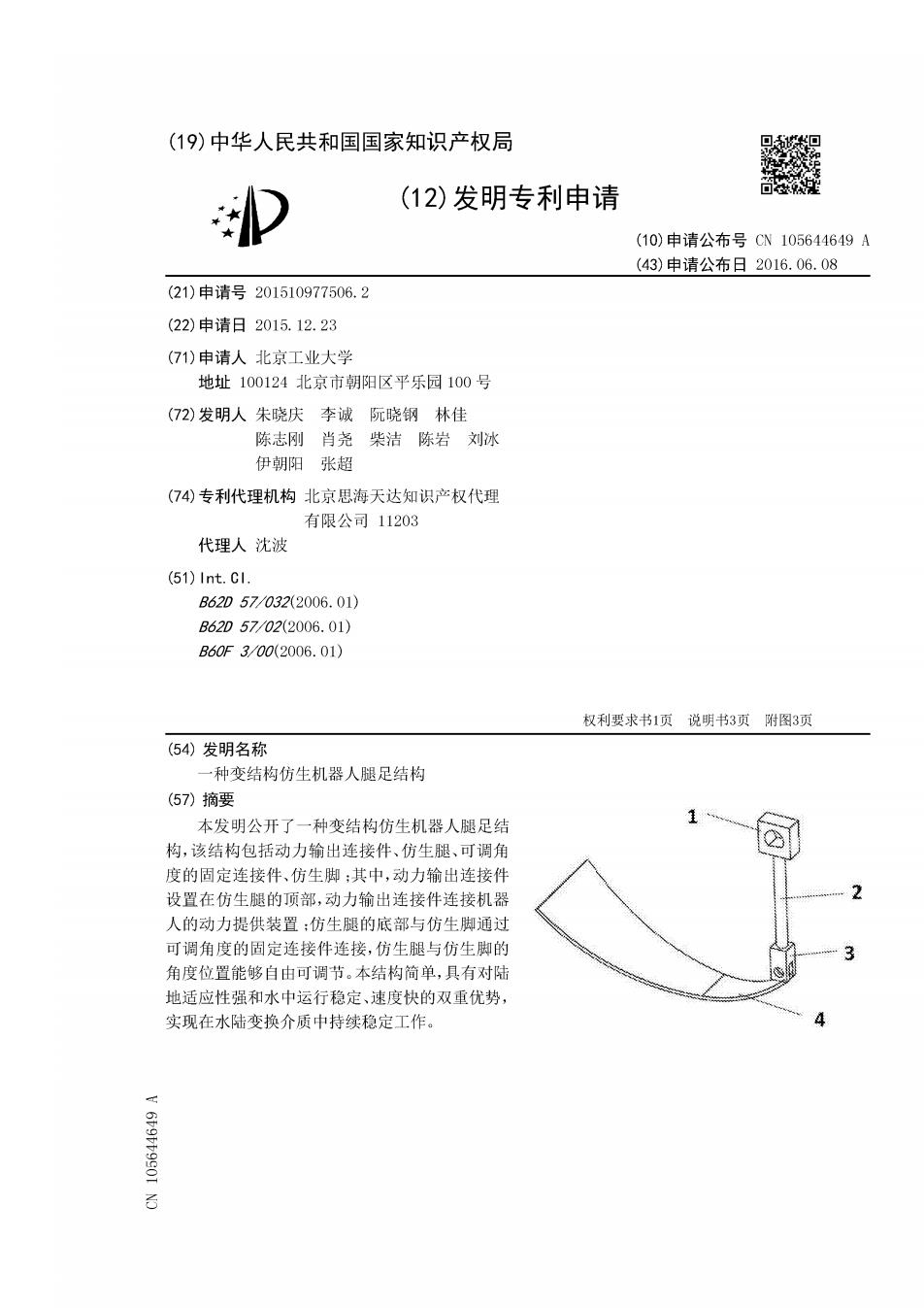
(19)中华人民共和国国家知识产权局 ▣▣ (12)发明专利申请 (10)申请公布号CN105644649A (43)申请公布日2016.06.08 (21)申请号201510977506.2 (22)申请日2015.12.23 (71)申请人北京工业大学 地址100124北京市朝阳区平乐园100号 (72)发明人朱晓庆李诚阮晓钢林佳 陈志刚肖尧 柴洁陈岩刘冰 伊朝阳张超 (74)专利代理机构北京思海天达知识产权代理 有限公司11203 代理人沈波 (51)Int.CI. B62D57032(2006.01) B62D57/02(2006.01) B60F300(2006.01) 权利要求书1页说明书3页附图3页 (54)发明名称 一种变结构仿生机器人腿足结构 (57)摘要 本发明公开了一种变结构仿生机器人腿足结 构,该结构包括动力输出连接件、仿生腿、可调角 度的固定连接件、仿生脚;其中,动力输出连接件 设置在仿生腿的顶部,动力输出连接件连接机器 人的动力提供装置:仿生腿的底部与仿生脚通过 可调角度的固定连接件连接,仿生腿与仿生脚的 角度位置能够自由可调节。本结构简单,具有对陆 地适应性强和水中运行稳定、速度快的双重优势, 实现在水陆变换介质中持续稳定工作。 27955940真N