正在加载图片...
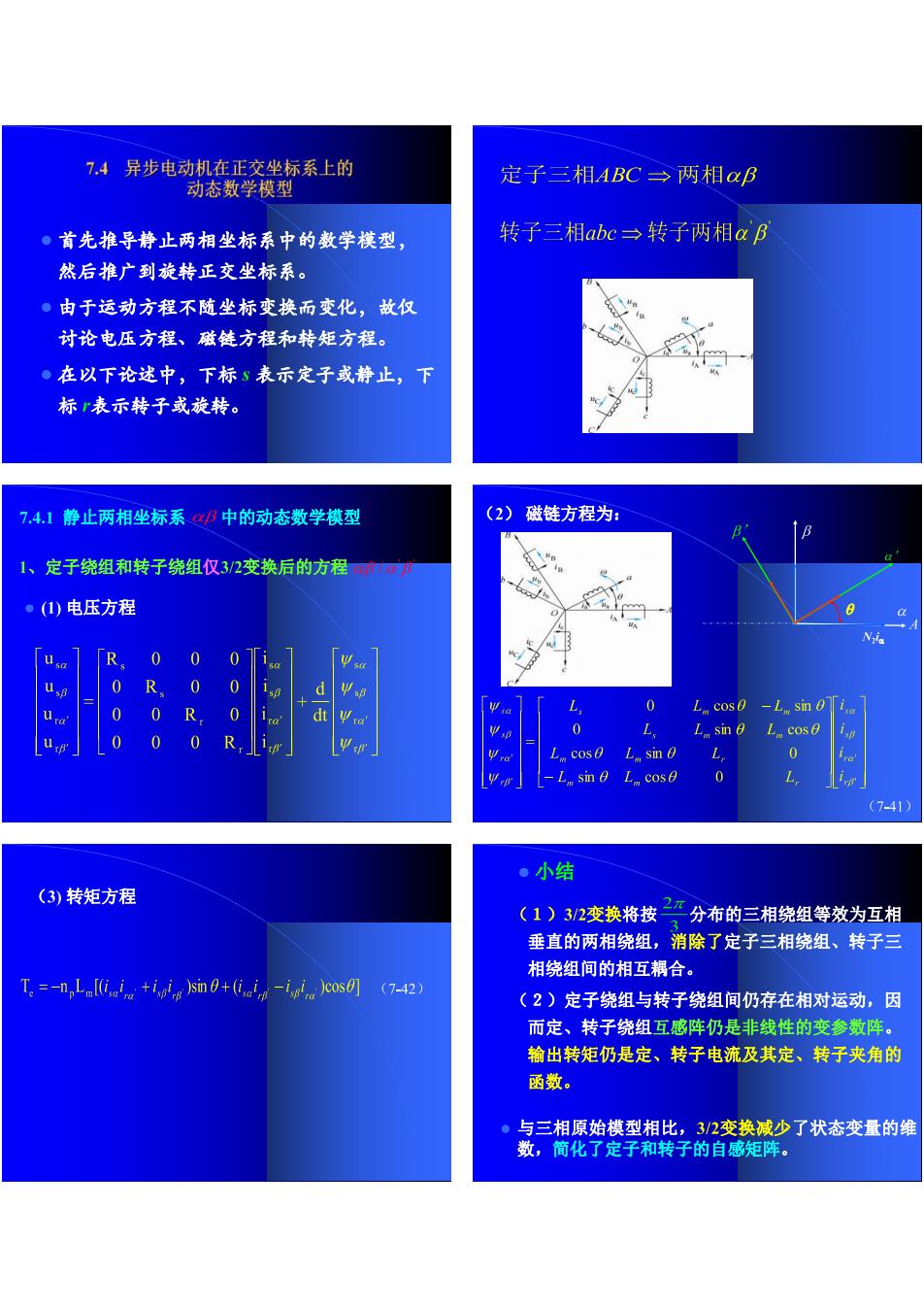
7.4异步电动机在正交坐标系上的 定子三相ABC→两相aB 动态数学模型 ○首先推导静止两相坐标系中的数学模型, 转子三相abc三转子两相aB 然后推广到旋转正交坐标系。 。由于运动方程不随坐标变换而变化,故仅 讨论电压方程、磁链方程和转矩方程。 在以下论述中,下标表示定子或静止,下 标表示转子或旋转。 7.4.1静止两相坐标系中的动态数学模型 (2)磁链方程为: 1、定子绕组和转子绕组仅3/2变换后的方程m ●(1)电压方程 -L si 0 L cos 0 小结 (3)转矩方程 (1)3/2变换将按 2红分布的三相绕组等效为互相 垂直的两相绕组,消除了定子三相绕组、转子三 相绕组间的相互耨合。 T.=-npLa(i+i)sn +(iiii )cos](742) (2)定子绕组与转子绕组间仍存在相对运动,因 而定、转子绕组互感阵仍是非线性的变参数阵。 输出转矩仍是定、转子电流及其定、转子夹角的 函数。 3/2变换减少了状态变量的 子和转子的自成