正在加载图片...
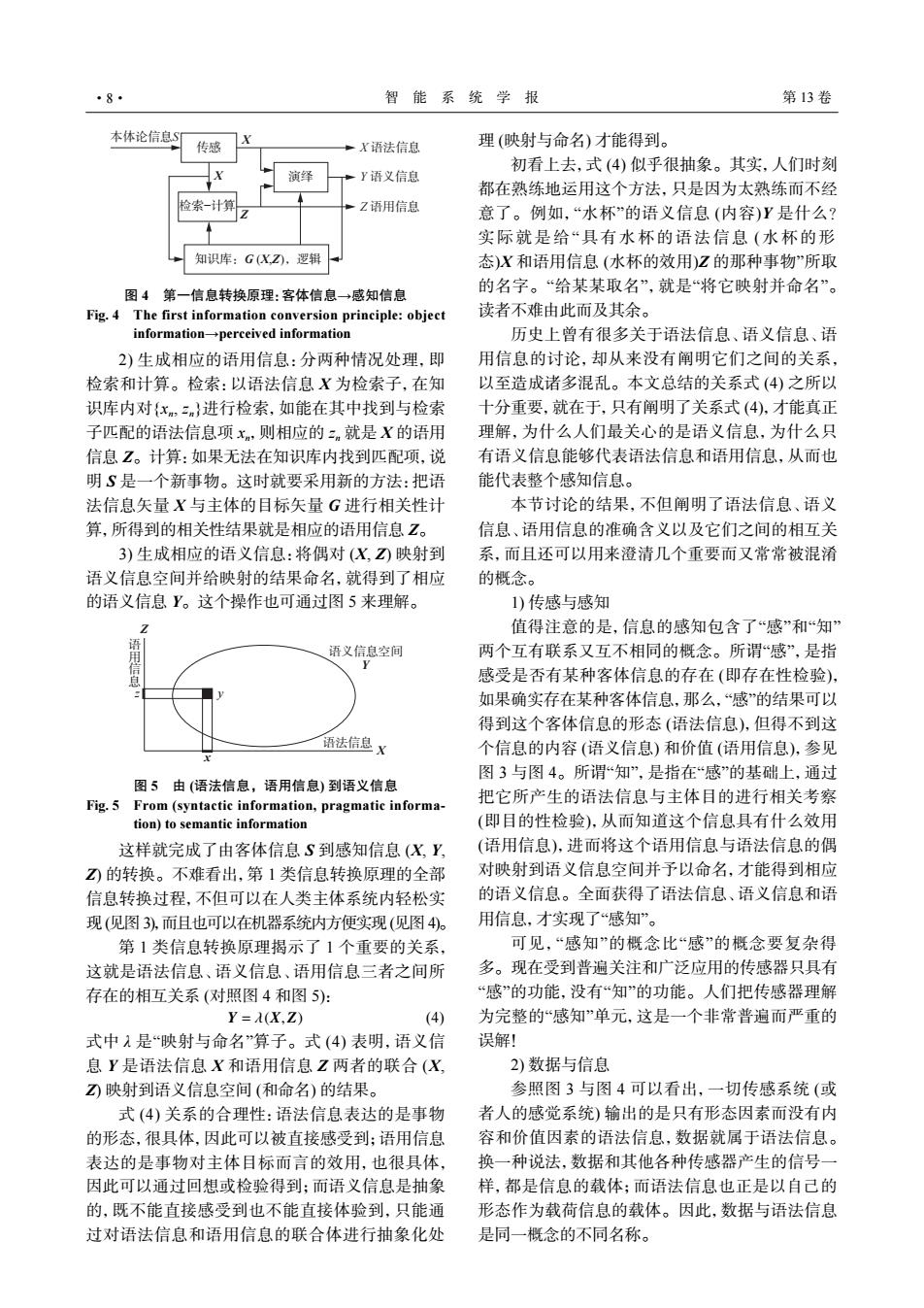
智能系统学报 第13卷 本体论信息S 传感 。X语法信息 理(映射与命名)才能得到。 初看上去,式(4)似乎很抽象。其实,人们时刻 演绎 Y语义信息 都在熟练地运用这个方法,只是因为太熟练而不经 检索-计 Z语用信息 意了。例如,“水杯的语义信息(内容)Y是什么? 实际就是给“具有水杯的语法信息(水杯的形 知识库:G(化,2),逻辑 态)X和语用信息(水杯的效用)Z的那种事物”所取 图4第一信息转换原理:客体信息→感知信息 的名字。“给某某取名”,就是“将它映射并命名”。 Fig.4 The first information conversion principle:object 读者不难由此而及其余。 information-perceived information 历史上曾有很多关于语法信息、语义信息、语 2)生成相应的语用信息:分两种情况处理,即 用信息的讨论,却从来没有阐明它们之间的关系, 检索和计算。检索:以语法信息X为检索子,在知 以至造成诸多混乱。本文总结的关系式(4)之所以 识库内对{x,}进行检索,如能在其中找到与检索 十分重要,就在于,只有阐明了关系式(4),才能真正 子匹配的语法信息项xm,则相应的:n就是X的语用 理解,为什么人们最关心的是语义信息,为什么只 信息Z。计算:如果无法在知识库内找到匹配项,说 有语义信息能够代表语法信息和语用信息,从而也 明S是一个新事物。这时就要采用新的方法:把语 能代表整个感知信息。 法信息矢量X与主体的目标矢量G进行相关性计 本节讨论的结果,不但阐明了语法信息、语义 算,所得到的相关性结果就是相应的语用信息Z。 信息、语用信息的准确含义以及它们之间的相互关 3)生成相应的语义信息:将偶对(X,Z)映射到 系,而且还可以用来澄清几个重要而又常常被混淆 语义信息空间并给映射的结果命名,就得到了相应 的概念。 的语义信息Y。这个操作也可通过图5来理解。 1)传感与感知 值得注意的是,信息的感知包含了“感”和“知” 语义信息空间 两个互有联系又互不相同的概念。所谓“感”,是指 感受是否有某种客体信息的存在(即存在性检验), 如果确实存在某种客体信息,那么,“感的结果可以 得到这个客体信息的形态(语法信息),但得不到这 语法信息X 个信息的内容(语义信息)和价值(语用信息),参见 图3与图4。所谓“知”,是指在“感的基础上,通过 图5由(语法信息,语用信息)到语义信息 Fig.5 From(syntactic information,pragmatic informa- 把它所产生的语法信息与主体目的进行相关考察 tion)to semantic information (即目的性检验),从而知道这个信息具有什么效用 这样就完成了由客体信息S到感知信息(X,Y, (语用信息),进而将这个语用信息与语法信息的偶 )的转换。不难看出,第1类信息转换原理的全部 对映射到语义信息空间并予以命名,才能得到相应 信息转换过程,不但可以在人类主体系统内轻松实 的语义信息。全面获得了语法信息、语义信息和语 现(见图3),而且也可以在机器系统内方便实现(见图4)。 用信息,才实现了“感知”。 第1类信息转换原理揭示了1个重要的关系, 可见,“感知”的概念比“感”的概念要复杂得 这就是语法信息、语义信息、语用信息三者之间所 多。现在受到普遍关注和广泛应用的传感器只具有 存在的相互关系(对照图4和图5): “感”的功能,没有“知”的功能。人们把传感器理解 Y=A(X,Z) (4) 为完整的“感知”单元,这是一个非常普遍而严重的 式中1是“映射与命名”算子。式(4)表明,语义信 误解! 息Y是语法信息X和语用信息Z两者的联合(X, 2)数据与信息 Z)映射到语义信息空间(和命名)的结果。 参照图3与图4可以看出,一切传感系统(或 式(4)关系的合理性:语法信息表达的是事物 者人的感觉系统)输出的是只有形态因素而没有内 的形态,很具体,因此可以被直接感受到;语用信息 容和价值因素的语法信息,数据就属于语法信息。 表达的是事物对主体目标而言的效用,也很具体, 换一种说法,数据和其他各种传感器产生的信号一 因此可以通过回想或检验得到:而语义信息是抽象 样,都是信息的载体;而语法信息也正是以自己的 的,既不能直接感受到也不能直接体验到,只能通 形态作为载荷信息的载体。因此,数据与语法信息 过对语法信息和语用信息的联合体进行抽象化处 是同一概念的不同名称。X 语法信息 Y 语义信息 Z 语用信息 演绎 传感 X X 检索−计算 Z 本体论信息S 知识库:G (X,Z),逻辑 图 4 第一信息转换原理:客体信息→感知信息 Fig. 4 The first information conversion principle: object information→perceived information 2) 生成相应的语用信息:分两种情况处理,即 检索和计算。检索:以语法信息 X 为检索子,在知 识库内对{xn , zn}进行检索,如能在其中找到与检索 子匹配的语法信息项 xn,则相应的 zn 就是 X 的语用 信息 Z。计算:如果无法在知识库内找到匹配项,说 明 S 是一个新事物。这时就要采用新的方法:把语 法信息矢量 X 与主体的目标矢量 G 进行相关性计 算,所得到的相关性结果就是相应的语用信息 Z。 3) 生成相应的语义信息:将偶对 (X, Z) 映射到 语义信息空间并给映射的结果命名,就得到了相应 的语义信息 Y。这个操作也可通过图 5 来理解。 Z X 语用信息 语义信息空间 Y 语法信息 z y x 图 5 由 (语法信息,语用信息) 到语义信息 Fig. 5 From (syntactic information, pragmatic information) to semantic information 这样就完成了由客体信息 S 到感知信息 (X, Y, Z) 的转换。不难看出,第 1 类信息转换原理的全部 信息转换过程,不但可以在人类主体系统内轻松实 现 (见图 3),而且也可以在机器系统内方便实现 (见图 4)。 第 1 类信息转换原理揭示了 1 个重要的关系, 这就是语法信息、语义信息、语用信息三者之间所 存在的相互关系 (对照图 4 和图 5): Y = λ(X, Z) (4) 式中 λ 是“映射与命名”算子。式 (4) 表明,语义信 息 Y 是语法信息 X 和语用信息 Z 两者的联合 (X, Z) 映射到语义信息空间 (和命名) 的结果。 式 (4) 关系的合理性:语法信息表达的是事物 的形态,很具体,因此可以被直接感受到;语用信息 表达的是事物对主体目标而言的效用,也很具体, 因此可以通过回想或检验得到;而语义信息是抽象 的,既不能直接感受到也不能直接体验到,只能通 过对语法信息和语用信息的联合体进行抽象化处 理 (映射与命名) 才能得到。 初看上去,式 (4) 似乎很抽象。其实,人们时刻 都在熟练地运用这个方法,只是因为太熟练而不经 意了。例如,“水杯”的语义信息 (内容)Y 是什么? 实际就是给“具有水杯的语法信息 (水杯的形 态)X 和语用信息 (水杯的效用)Z 的那种事物”所取 的名字。“给某某取名”,就是“将它映射并命名”。 读者不难由此而及其余。 历史上曾有很多关于语法信息、语义信息、语 用信息的讨论,却从来没有阐明它们之间的关系, 以至造成诸多混乱。本文总结的关系式 (4) 之所以 十分重要,就在于,只有阐明了关系式 (4),才能真正 理解,为什么人们最关心的是语义信息,为什么只 有语义信息能够代表语法信息和语用信息,从而也 能代表整个感知信息。 本节讨论的结果,不但阐明了语法信息、语义 信息、语用信息的准确含义以及它们之间的相互关 系,而且还可以用来澄清几个重要而又常常被混淆 的概念。 1) 传感与感知 值得注意的是,信息的感知包含了“感”和“知” 两个互有联系又互不相同的概念。所谓“感”,是指 感受是否有某种客体信息的存在 (即存在性检验), 如果确实存在某种客体信息,那么,“感”的结果可以 得到这个客体信息的形态 (语法信息),但得不到这 个信息的内容 (语义信息) 和价值 (语用信息),参见 图 3 与图 4。所谓“知”,是指在“感”的基础上,通过 把它所产生的语法信息与主体目的进行相关考察 (即目的性检验),从而知道这个信息具有什么效用 (语用信息),进而将这个语用信息与语法信息的偶 对映射到语义信息空间并予以命名,才能得到相应 的语义信息。全面获得了语法信息、语义信息和语 用信息,才实现了“感知”。 可见,“感知”的概念比“感”的概念要复杂得 多。现在受到普遍关注和广泛应用的传感器只具有 “感”的功能,没有“知”的功能。人们把传感器理解 为完整的“感知”单元,这是一个非常普遍而严重的 误解! 2) 数据与信息 参照图 3 与图 4 可以看出,一切传感系统 (或 者人的感觉系统) 输出的是只有形态因素而没有内 容和价值因素的语法信息,数据就属于语法信息。 换一种说法,数据和其他各种传感器产生的信号一 样,都是信息的载体;而语法信息也正是以自己的 形态作为载荷信息的载体。因此,数据与语法信息 是同一概念的不同名称。 ·8· 智 能 系 统 学 报 第 13 卷