正在加载图片...
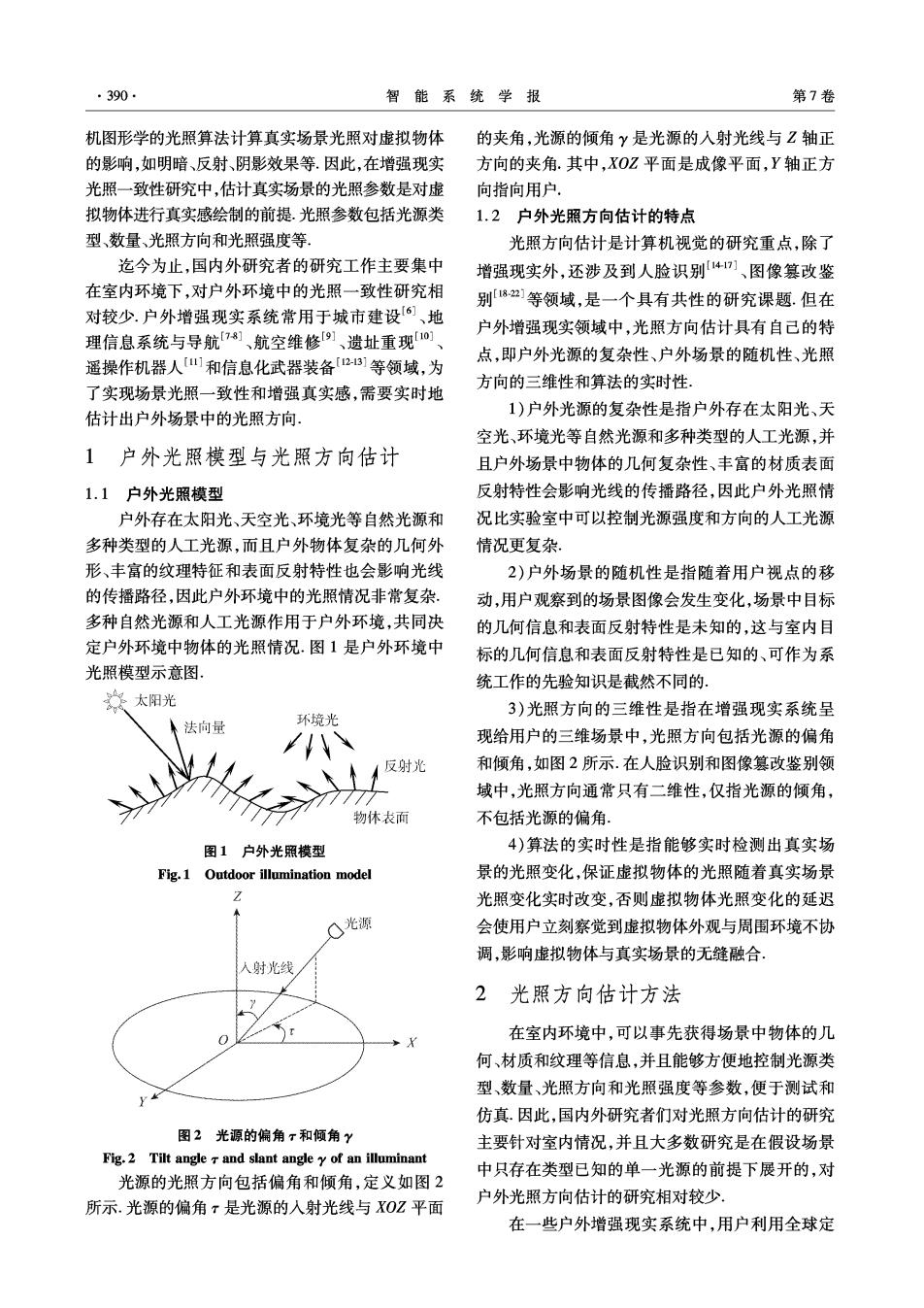
·390· 智能系统学报 第7卷 机图形学的光照算法计算真实场景光照对虚拟物体 的夹角,光源的倾角Y是光源的入射光线与Z轴正 的影响,如明暗、反射、阴影效果等.因此,在增强现实 方向的夹角.其中,XOZ平面是成像平面,Y轴正方 光照一致性研究中,估计真实场景的光照参数是对虚 向指向用户. 拟物体进行真实感绘制的前提.光照参数包括光源类 1.2户外光照方向估计的特点 型、数量、光照方向和光照强度等。 光照方向估计是计算机视觉的研究重点,除了 迄今为止,国内外研究者的研究工作主要集中 增强现实外,还涉及到人脸识别4、图像篡改鉴 在室内环境下,对户外环境中的光照一致性研究相 别182]等领域,是一个具有共性的研究课题.但在 对较少.户外增强现实系统常用于城市建设6]、地 户外增强现实领域中,光照方向估计具有自己的特 理信息系统与导航7]、航空维修9、遗址重现 点,即户外光源的复杂性、户外场景的随机性、光照 遥操作机器人]和信息化武器装备[213]等领域,为 方向的三维性和算法的实时性。 了实现场景光照一致性和增强真实感,需要实时地 估计出户外场景中的光照方向, 1)户外光源的复杂性是指户外存在太阳光、天 空光、环境光等自然光源和多种类型的人工光源,并 1户外光照模型与光照方向估计 且户外场景中物体的几何复杂性、丰富的材质表面 1.1户外光照模型 反射特性会影响光线的传播路径,因此户外光照情 户外存在太阳光、天空光、环境光等自然光源和 况比实验室中可以控制光源强度和方向的人工光源 多种类型的人工光源,而且户外物体复杂的几何外 情况更复杂. 形、丰富的纹理特征和表面反射特性也会影响光线 2)户外场景的随机性是指随着用户视点的移 的传播路径,因此户外环境中的光照情况非常复杂 动,用户观察到的场景图像会发生变化,场景中目标 多种自然光源和人工光源作用于户外环境,共同决 的几何信息和表面反射特性是未知的,这与室内目 定户外环境中物体的光照情况.图1是户外环境中 标的几何信息和表面反射特性是已知的、可作为系 光照模型示意图 统工作的先验知识是截然不同的. 次太阳光 3)光照方向的三维性是指在增强现实系统呈 法向量 环境光 现给用户的三维场景中,光照方向包括光源的偏角 反射光 和倾角,如图2所示.在人脸识别和图像篡改鉴别领 域中,光照方向通常只有二维性,仅指光源的倾角, 物体表面而 不包括光源的偏角。 图1户外光照模型 4)算法的实时性是指能够实时检测出真实场 Fig.1 Outdoor illumination model 景的光照变化,保证虚拟物体的光照随着真实场景 光照变化实时改变,否则虚拟物体光照变化的延迟 0光源 会使用户立刻察觉到虚拟物体外观与周围环境不协 调,影响虚拟物体与真实场景的无缝融合 人射光线 2光照方向估计方法 在室内环境中,可以事先获得场景中物体的几 何、材质和纹理等信息,并且能够方便地控制光源类 型、数量、光照方向和光照强度等参数,便于测试和 仿真.因此,国内外研究者们对光照方向估计的研究 图2光源的偏角?和倾角Y 主要针对室内情况,并且大多数研究是在假设场景 Fig.2 Tilt angle r and slant angle y of an illuminant 中只存在类型已知的单一光源的前提下展开的,对 光源的光照方向包括偏角和倾角,定义如图2 所示.光源的偏角?是光源的入射光线与XOZ平面 户外光照方向估计的研究相对较少 在一些户外增强现实系统中,用户利用全球定