正在加载图片...
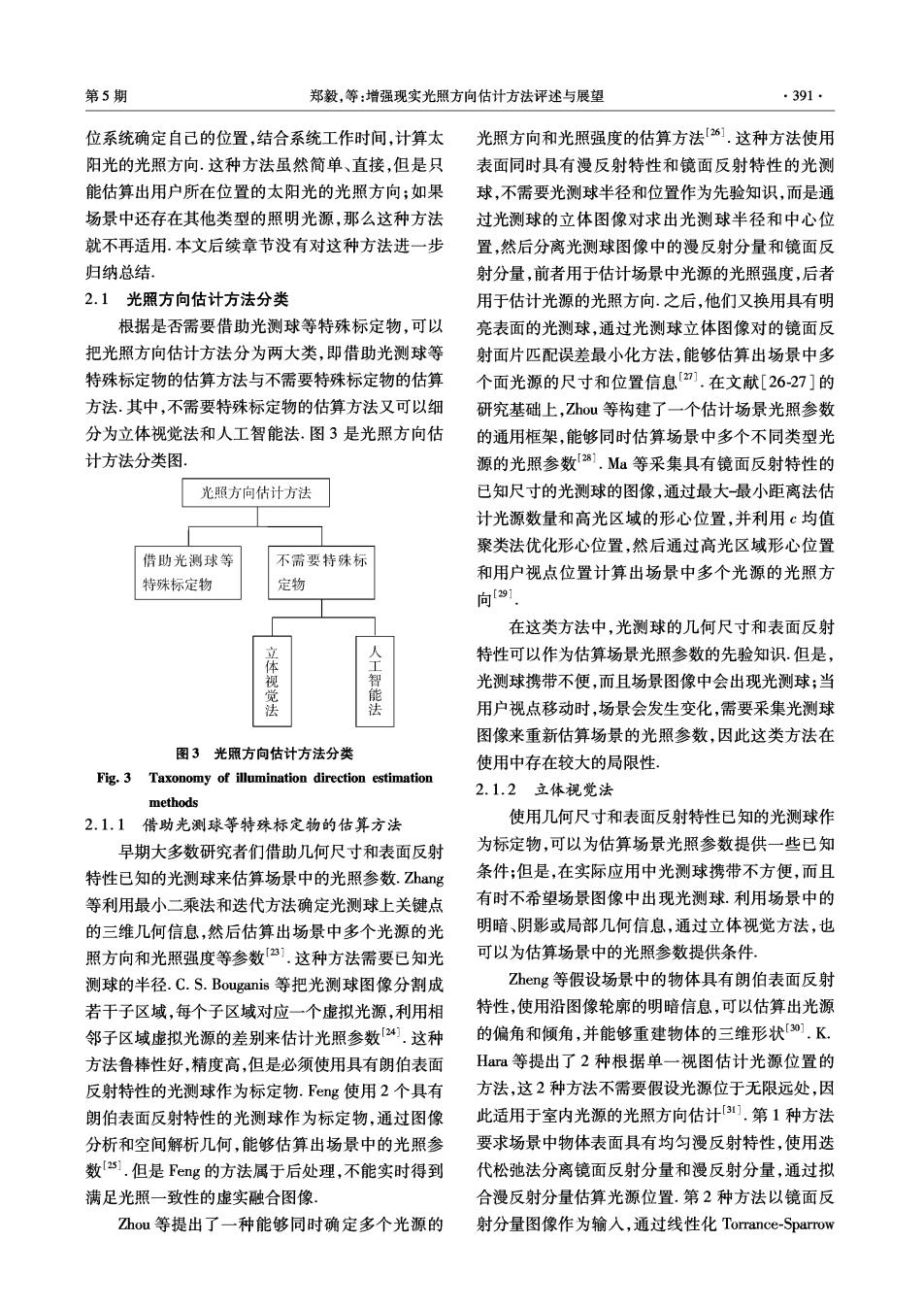
第5期 郑毅,等:增强现实光照方向估计方法评述与展望 .391· 位系统确定自已的位置,结合系统工作时间,计算太 光照方向和光照强度的估算方法[26].这种方法使用 阳光的光照方向.这种方法虽然简单、直接,但是只 表面同时具有漫反射特性和镜面反射特性的光测 能估算出用户所在位置的太阳光的光照方向;如果 球,不需要光测球半径和位置作为先验知识,而是通 场景中还存在其他类型的照明光源,那么这种方法 过光测球的立体图像对求出光测球半径和中心位 就不再适用.本文后续章节没有对这种方法进一步 置,然后分离光测球图像中的漫反射分量和镜面反 归纳总结 射分量,前者用于估计场景中光源的光照强度,后者 2.1光照方向估计方法分类 用于估计光源的光照方向.之后,他们又换用具有明 根据是否需要借助光测球等特殊标定物,可以 亮表面的光测球,通过光测球立体图像对的镜面反 把光照方向估计方法分为两大类,即借助光测球等 射面片匹配误差最小化方法,能够估算出场景中多 特殊标定物的估算方法与不需要特殊标定物的估算 个面光源的尺寸和位置信息[.在文献[2627]的 方法.其中,不需要特殊标定物的估算方法又可以细 研究基础上,Zhou等构建了一个估计场景光照参数 分为立体视觉法和人工智能法.图3是光照方向估 的通用框架,能够同时估算场景中多个不同类型光 计方法分类图 源的光照参数[8].Ma等采集具有镜面反射特性的 光照方向估计方法 已知尺寸的光测球的图像,通过最大最小距离法估 计光源数量和高光区域的形心位置,并利用c均值 聚类法优化形心位置,然后通过高光区域形心位置 借助光测球等 不需要特殊标 和用户视点位置计算出场景中多个光源的光照方 特殊标定物 定物 向291 在这类方法中,光测球的几何尺寸和表面反射 特性可以作为估算场景光照参数的先验知识.但是, 工 体视觉法 智能法 光测球携带不便,而且场景图像中会出现光测球;当 用户视点移动时,场景会发生变化,需要采集光测球 图像来重新估算场景的光照参数,因此这类方法在 图3光照方向估计方法分类 使用中存在较大的局限性 Fig.3 Taxonomy of illumination direction estimation 2.1.2立体视觉法 methods 2.1.1借助光测球等特殊标定物的估算方法 使用几何尺寸和表面反射特性已知的光测球作 早期大多数研究者们借助几何尺寸和表面反射 为标定物,可以为估算场景光照参数提供一些已知 特性已知的光测球来估算场景中的光照参数.Zhang 条件:但是,在实际应用中光测球携带不方便,而且 等利用最小二乘法和迭代方法确定光测球上关键点 有时不希望场景图像中出现光测球.利用场景中的 的三维几何信息,然后估算出场景中多个光源的光 明暗、阴影或局部几何信息,通过立体视觉方法,也 照方向和光照强度等参数).这种方法需要已知光 可以为估算场景中的光照参数提供条件, 测球的半径.C.S.Bouganis等把光测球图像分割成 Zheng等假设场景中的物体具有朗伯表面反射 若干子区域,每个子区域对应一个虚拟光源,利用相 特性,使用沿图像轮廓的明暗信息,可以估算出光源 邻子区域虚拟光源的差别来估计光照参数24).这种 的偏角和倾角,并能够重建物体的三维形状「[∞).K, 方法鲁棒性好,精度高,但是必须使用具有朗伯表面 Hara等提出了2种根据单一视图估计光源位置的 反射特性的光测球作为标定物.Feng使用2个具有 方法,这2种方法不需要假设光源位于无限远处,因 朗伯表面反射特性的光测球作为标定物,通过图像 此适用于室内光源的光照方向估计3].第1种方法 分析和空间解析几何,能够估算出场景中的光照参 要求场景中物体表面具有均匀漫反射特性,使用迭 数2s).但是eng的方法属于后处理,不能实时得到 代松弛法分离镜面反射分量和漫反射分量,通过拟 满足光照一致性的虚实融合图像, 合漫反射分量估算光源位置.第2种方法以镜面反 Zou等提出了一种能够同时确定多个光源的 射分量图像作为输入,通过线性化Torrance-Sparrow