正在加载图片...
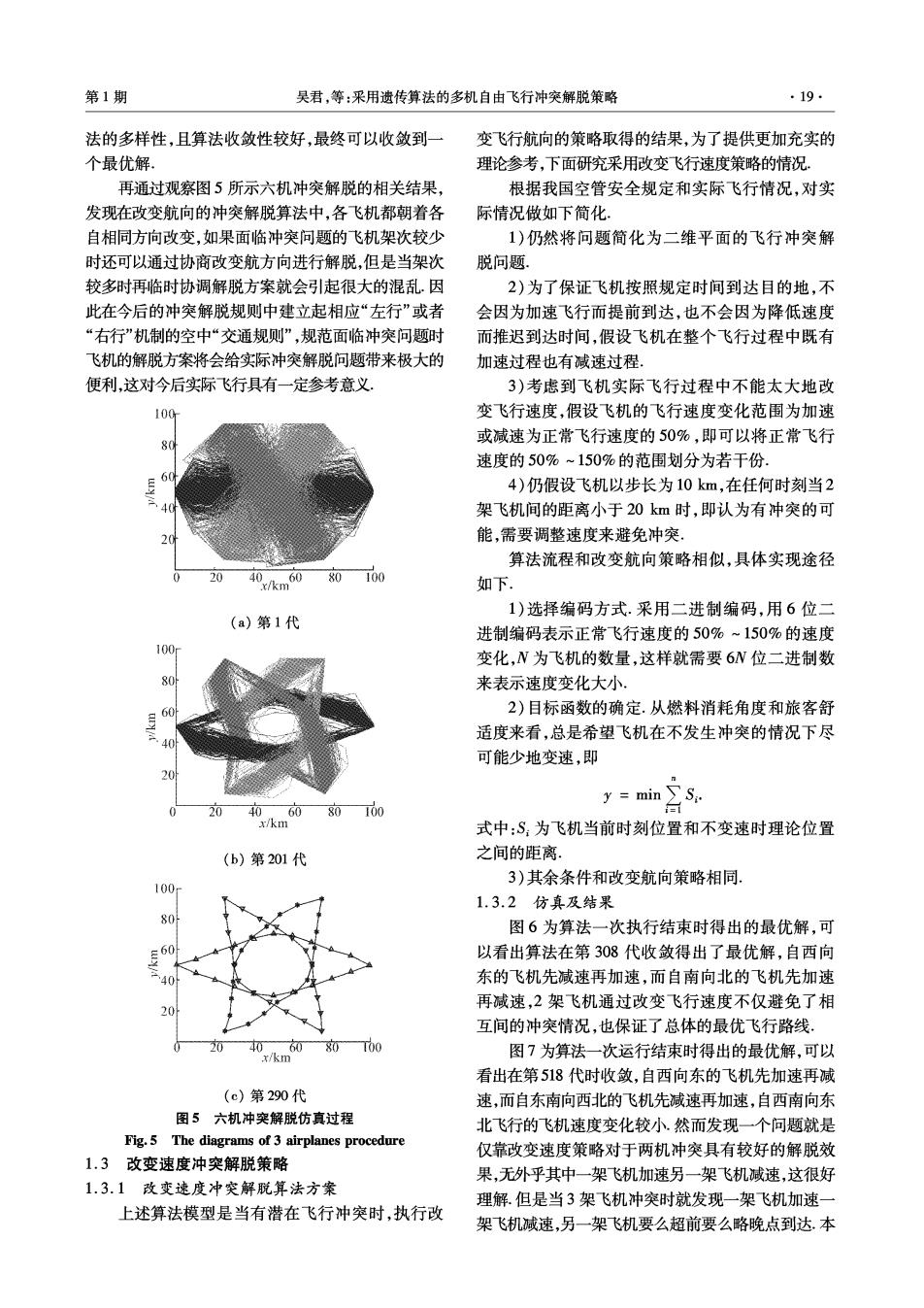
第1期 吴君,等:采用遗传算法的多机自由飞行冲突解脱策略 ·19 法的多样性,且算法收敛性较好,最终可以收敛到一 变飞行航向的策略取得的结果,为了提供更加充实的 个最优解. 理论参考,下面研究采用改变飞行速度策略的情况 再通过观察图5所示六机冲突解脱的相关结果, 根据我国空管安全规定和实际飞行情况,对实 发现在改变航向的冲突解脱算法中,各飞机都朝着各 际情况做如下简化, 自相同方向改变,如果面临冲突问题的飞机架次较少 1)仍然将问题简化为二维平面的飞行冲突解 时还可以通过协商改变航方向进行解脱,但是当架次 脱问题 较多时再临时协调解脱方案就会引起很大的混乱.因 2)为了保证飞机按照规定时间到达目的地,不 此在今后的冲突解脱规则中建立起相应“左行”或者 会因为加速飞行而提前到达,也不会因为降低速度 “右行”机制的空中“交通规则”,规范面临冲突问题时 而推迟到达时间,假设飞机在整个飞行过程中既有 飞机的解脱方案将会给实际冲突解脱问题带来极大的 加速过程也有减速过程. 便利,这对今后实际飞行具有一定参考意义 3)考虑到飞机实际飞行过程中不能太大地改 变飞行速度,假设飞机的飞行速度变化范围为加速 或减速为正常飞行速度的50%,即可以将正常飞行 速度的50%~150%的范围划分为若干份. 4)仍假设飞机以步长为10km,在任何时刻当2 架飞机间的距离小于20km时,即认为有冲突的可 能,需要调整速度来避免冲突。 算法流程和改变航向策略相似,具体实现途径 20 40km608000 如下. 1)选择编码方式.采用二进制编码,用6位二 (a)第1代 进制编码表示正常飞行速度的50%~150%的速度 100 变化,N为飞机的数量,这样就需要6N位二进制数 80 来表示速度变化大小 60 2)目标函数的确定.从燃料消耗角度和旅客舒 适度来看,总是希望飞机在不发生冲突的情况下尽 可能少地变速,即 20 y=min∑S, 20 406080100 x/km 式中:S:为飞机当前时刻位置和不变速时理论位置 (b)第201代 之间的距离, 3)其余条件和改变航向策略相同. 100 1.3.2仿真及结果 80 图6为算法一次执行结束时得出的最优解,可 以看出算法在第308代收敛得出了最优解,自西向 40 东的飞机先减速再加速,而自南向北的飞机先加速 再减速,2架飞机通过改变飞行速度不仅避免了相 20 互间的冲突情况,也保证了总体的最优飞行路线. 40 6080T00 x/km 图7为算法一次运行结束时得出的最优解,可以 看出在第518代时收敛,自西向东的飞机先加速再减 (c)第290代 速,而自东南向西北的飞机先减速再加速,自西南向东 图5六机冲突解脱仿真过程 北飞行的飞机速度变化较小.然而发现一个问题就是 Fig.5 The diagrams of 3 airplanes procedure 仅靠改变速度策略对于两机冲突具有较好的解脱效 1.3改变速度冲突解脱策略 果,无外乎其中一架飞机加速另一架飞机减速,这很好 1.3.1改变速度冲突解脱算法方案 理解.但是当3架飞机冲突时就发现一架飞机加速一 上述算法模型是当有潜在飞行冲突时,执行改 架飞机减速,另一架飞机要么超前要么略晚点到达.本