正在加载图片...
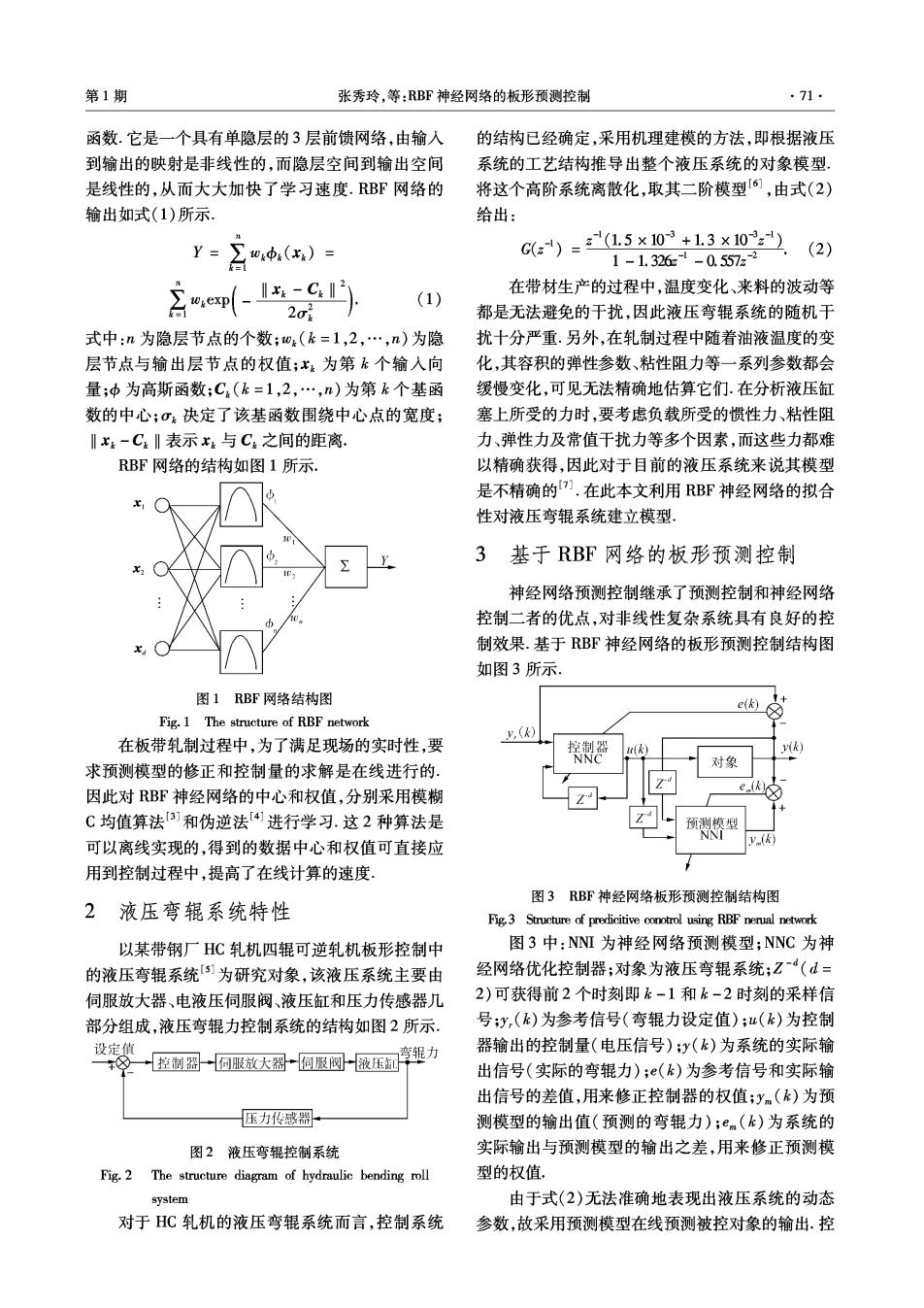
第1期 张秀玲,等:RBF神经网络的板形预测控制 ·71 函数.它是一个具有单隐层的3层前馈网络,由输人 的结构已经确定,采用机理建模的方法,即根据液压 到输出的映射是非线性的,而隐层空间到输出空间 系统的工艺结构推导出整个液压系统的对象模型, 是线性的,从而大大加快了学习速度.RBF网络的 将这个高阶系统离散化,取其二阶模型,由式(2)》 输出如式(1)所示 给出: Y=∑0中(x) Ge)='1.5×103+1.3×102 .(2) 1-1.326x1-0.557z2 在带材生产的过程中,温度变化、来料的波动等 (1) 都是无法避免的干扰,因此液压弯辊系统的随机干 式中:n为隐层节点的个数;0(k=1,2,…,n)为隐 扰十分严重.另外,在轧制过程中随着油液温度的变 层节点与输出层节点的权值;为第k个输入向 化,其容积的弹性参数、粘性阻力等一系列参数都会 量;中为高斯函数;C(k=1,2,…,n)为第k个基函 缓慢变化,可见无法精确地估算它们.在分析液压缸 数的中心;σk决定了该基函数围绕中心点的宽度; 塞上所受的力时,要考虑负载所受的惯性力、粘性阻 ‖。-Ck‖表示x与C之间的距离。 力、弹性力及常值干扰力等多个因素,而这些力都难 RBF网络的结构如图1所示. 以精确获得,因此对于目前的液压系统来说其模型 是不精确的7],在此本文利用RBF神经网络的拟合 性对液压弯辊系统建立模型, 3基于RBF网络的板形预测控制 神经网络预测控制继承了预测控制和神经网络 控制二者的优点,对非线性复杂系统具有良好的控 制效果.基于RBF神经网络的板形预测控制结构图 如图3所示. 图1RBF网络结构图 e(k) Fig.1 The structure of RBF network 在板带轧制过程中,为了满足现场的实时性,要 控制器 求预测模型的修正和控制量的求解是在线进行的. 对象 因此对BF神经网络的中心和权值,分别采用模糊 e C均值算法「3)和伪逆法「41进行学习.这2种算法是 测模型 可以离线实现的,得到的数据中心和权值可直接应 V(K 用到控制过程中,提高了在线计算的速度. 图3RBF神经网络板形预测控制结构图 2液压弯辊系统特性 Fig3 Structure of predicitive contol using RBF nerual network 以某带钢厂HC轧机四辊可逆轧机板形控制中 图3中:NNI为神经网络预测模型;NNC为神 的液压弯辊系统[1为研究对象,该液压系统主要由 经网络优化控制器;对象为液压弯辊系统;Z4(d= 伺服放大器、电液压伺服阀、液压缸和压力传感器几 2)可获得前2个时刻即k-1和k-2时刻的采样信 部分组成,液压弯辊力控制系统的结构如图2所示. 号:y,(k)为参考信号(弯辊力设定值);u(k)为控制 设定值 →控制器一伺服放大器园服阃-液压缸李银力 器输出的控制量(电压信号);y(k)为系统的实际输 出信号(实际的弯辊力);(k)为参考信号和实际输 出信号的差值,用来修正控制器的权值;ym(k)为预 压力传感器 测模型的输出值(预测的弯辊力);em(k)为系统的 图2液压弯辊控制系统 实际输出与预测模型的输出之差,用来修正预测模 Fig.2 The structure diagram of hydraulic bending roll 型的权值。 system 由于式(2)无法准确地表现出液压系统的动态 对于HC轧机的液压弯辊系统而言,控制系统 参数,故采用预测模型在线预测被控对象的输出.控