正在加载图片...
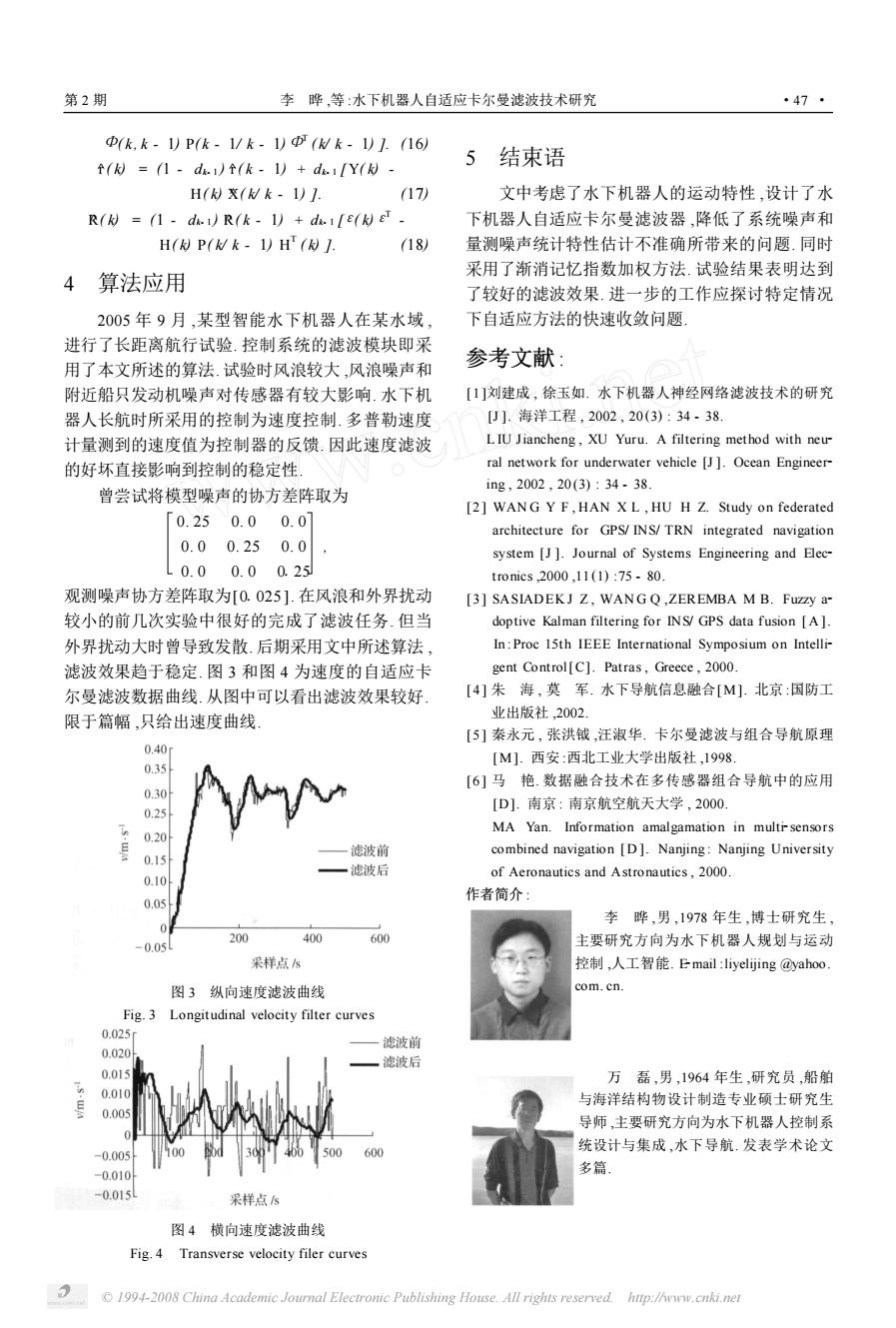
第2期 李晔,等:水下机器人自适应卡尔曼滤波技术研究 ·47· Φ(k,k-)P(k-1/k-1)D(Mk-1)1.(16) f(d=1-d.个(k-1)+d.1Y(- 5结束语 H(究(Wk-1)]. 17) 文中考虑了水下机器人的运动特性,设计了水 R(k)=(1-d.)R(k-1)+du.[e( 下机器人自适应卡尔曼滤波器,降低了系统噪声和 H(k)P(/k-1)H(] (18) 量测噪声统计特性估计不准确所带来的问题.同时 采用了渐消记忆指数加权方法.试验结果表明达到 4算法应用 了较好的滤波效果.进一步的工作应探讨特定情况 2005年9月,某型智能水下机器人在某水域, 下自适应方法的快速收敛问题 进行了长距离航行试验.控制系统的滤波模块即采 用了本文所述的算法.试验时风浪较大,风浪噪声和 参考文献: 附近船只发动机噪声对传感器有较大影响.水下机 [1]刘建成,徐玉如.水下机器人神经网络滤波技术的研究 器人长航时所采用的控制为速度控制,多普勒速度 [J].海洋工程,2002,20(3):34-38. 计量测到的速度值为控制器的反馈.因此速度滤波 LIU Jiancheng,XU Yuru.A filtering method with neu 的好坏直接影响到控制的稳定性 ral network for underwater vehicle [J].Ocean Engineer- ing,2002,20(3):34-38. 曾尝试将模型噪声的协方差阵取为 [2]WANG Y F,HAN X L,HU H Z.Study on federated 0.250.00.0 architecture for GPS/INS/TRN integrated navigation 0.00.250.0 system [J ]Journal of Systems Engineering and Elec- 0.00.00.25☒ tronics,2000,11(1):75-80. 观测噪声协方差阵取为[0.025].在风浪和外界扰动 [3]SASIADEKJ Z,WANG Q,ZEREMBA M B.Fuzzy a- 较小的前几次实验中很好的完成了滤波任务.但当 doptive Kalman filtering for INS/GPS data fusion [A]. 外界扰动大时曾导致发散.后期采用文中所述算法, In:Proc 15th IEEE International Symposium on Intelli- 滤波效果趋于稳定.图3和图4为速度的自适应卡 gent Control[C].Patras,Greece,2000. 尔曼滤波数据曲线.从图中可以看出滤波效果较好. [4]朱海,莫军.水下导航信息融合[M].北京:因防工 限于篇幅,只给出速度曲线, 业出版社,2002. [5]秦永元,张洪钺,汪淑华.卡尔曼滤波与组合导航原理 0.40 [M].西安:西北工业大学出版社,1998 0.35 [6]马艳.数据融合技术在多传感器组合导航中的应用 0.30 0.25 [D].南京:南京航空航天大学,2000 MA Yan.Information amalgamation in multi-sensors 0.20 滤波前 combined navigation [D].Nanjing:Nanjing University 0.15 ·滤波后 0.10 of Aeronautics and Astronautics,2000. 作者简介: 0.05 李晔,男,1978年生,博士研究生 200 400 600 -0.05L 主要研究方向为水下机器人规划与运动 采样点s 控制,人工智能.Email:liyelijing@yahoo. 图3纵向速度滤波曲线 com.cn. Fig.3 Longitudinal velocity filter curves 0.025 一滤波前 0.020 ,滤波后 0.015 万磊,男,1964年生,研究员,船舶 0.01 与海洋结构物设计制造专业硕士研究生 0.005 导师,主要研究方向为水下机器人控制系 统设计与集成,水下导航.发表学术论文 -0.005 600 -0.010 多篇 -0.015 采样点5 图4横向速度滤波曲线 Fig.4 Transverse velocity filer curves 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved hup://www.cnki.netΦ( k , k - 1) P( k - 1/ k - 1)ΦT ( k/ k - 1) ]. (16) ^r ( k) = (1 - dk- 1 ) ^r ( k - 1) + dk- 1 [ Y( k) - H( k) X^ ( k/ k - 1) ]. (17) R^ ( k) = (1 - dk- 1 ) R^ ( k - 1) + dk- 1 [ε( k)εT - H( k) P( k/ k - 1) H T ( k) ]. (18) 4 算法应用 2005 年 9 月 ,某型智能水下机器人在某水域 , 进行了长距离航行试验. 控制系统的滤波模块即采 用了本文所述的算法. 试验时风浪较大 ,风浪噪声和 附近船只发动机噪声对传感器有较大影响. 水下机 器人长航时所采用的控制为速度控制. 多普勒速度 计量测到的速度值为控制器的反馈. 因此速度滤波 的好坏直接影响到控制的稳定性. 曾尝试将模型噪声的协方差阵取为 0. 25 0. 0 0. 0 0. 0 0. 25 0. 0 0. 0 0. 0 0125 , 观测噪声协方差阵取为[01025 ]. 在风浪和外界扰动 较小的前几次实验中很好的完成了滤波任务. 但当 外界扰动大时曾导致发散. 后期采用文中所述算法 , 滤波效果趋于稳定. 图 3 和图 4 为速度的自适应卡 尔曼滤波数据曲线. 从图中可以看出滤波效果较好. 限于篇幅 ,只给出速度曲线. 图 3 纵向速度滤波曲线 Fig. 3 Longitudinal velocity filter curves 图 4 横向速度滤波曲线 Fig. 4 Transverse velocity filer curves 5 结束语 文中考虑了水下机器人的运动特性 ,设计了水 下机器人自适应卡尔曼滤波器 ,降低了系统噪声和 量测噪声统计特性估计不准确所带来的问题. 同时 采用了渐消记忆指数加权方法. 试验结果表明达到 了较好的滤波效果. 进一步的工作应探讨特定情况 下自适应方法的快速收敛问题. 参考文献 : [1 ]刘建成 , 徐玉如. 水下机器人神经网络滤波技术的研究 [J ]. 海洋工程 , 2002 , 20 (3) : 34 - 38. L IU Jiancheng , XU Yuru. A filtering method with neu2 ral network for underwater vehicle [J ]. Ocean Engineer2 ing , 2002 , 20 (3) : 34 - 38. [2 ] WAN G Y F , HAN X L , HU H Z. Study on federated architecture for GPS/ INS/ TRN integrated navigation system [J ]. Journal of Systems Engineering and Elec2 tronics ,2000 ,11 (1) :75 - 80. [3 ] SASIADEK J Z , WAN G Q ,ZEREMBA M B. Fuzzy a2 doptive Kalman filtering for INS/ GPS data fusion [ A ]. In : Proc 15th IEEE International Symposium on Intelli2 gent Control[C]. Patras , Greece , 2000. [ 4 ] 朱 海 , 莫 军. 水下导航信息融合[ M]. 北京 :国防工 业出版社 ,2002. [5 ] 秦永元 , 张洪钺 ,汪淑华. 卡尔曼滤波与组合导航原理 [ M]. 西安 :西北工业大学出版社 ,1998. [6 ] 马 艳. 数据融合技术在多传感器组合导航中的应用 [D]. 南京 : 南京航空航天大学 , 2000. MA Yan. Information amalgamation in multi2sensors combined navigation [ D ]. Nanjing : Nanjing University of Aeronautics and Astronautics , 2000. 作者简介 : 李 晔 ,男 ,1978 年生 ,博士研究生 , 主要研究方向为水下机器人规划与运动 控制 ,人工智能. E2mail :liyelijing @yahoo. com. cn. 万 磊 ,男 ,1964 年生 ,研究员 ,船舶 与海洋结构物设计制造专业硕士研究生 导师 ,主要研究方向为水下机器人控制系 统设计与集成 ,水下导航. 发表学术论文 多篇. 第 2 期 李 晔 ,等 :水下机器人自适应卡尔曼滤波技术研究 · 74 · © 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net