正在加载图片...
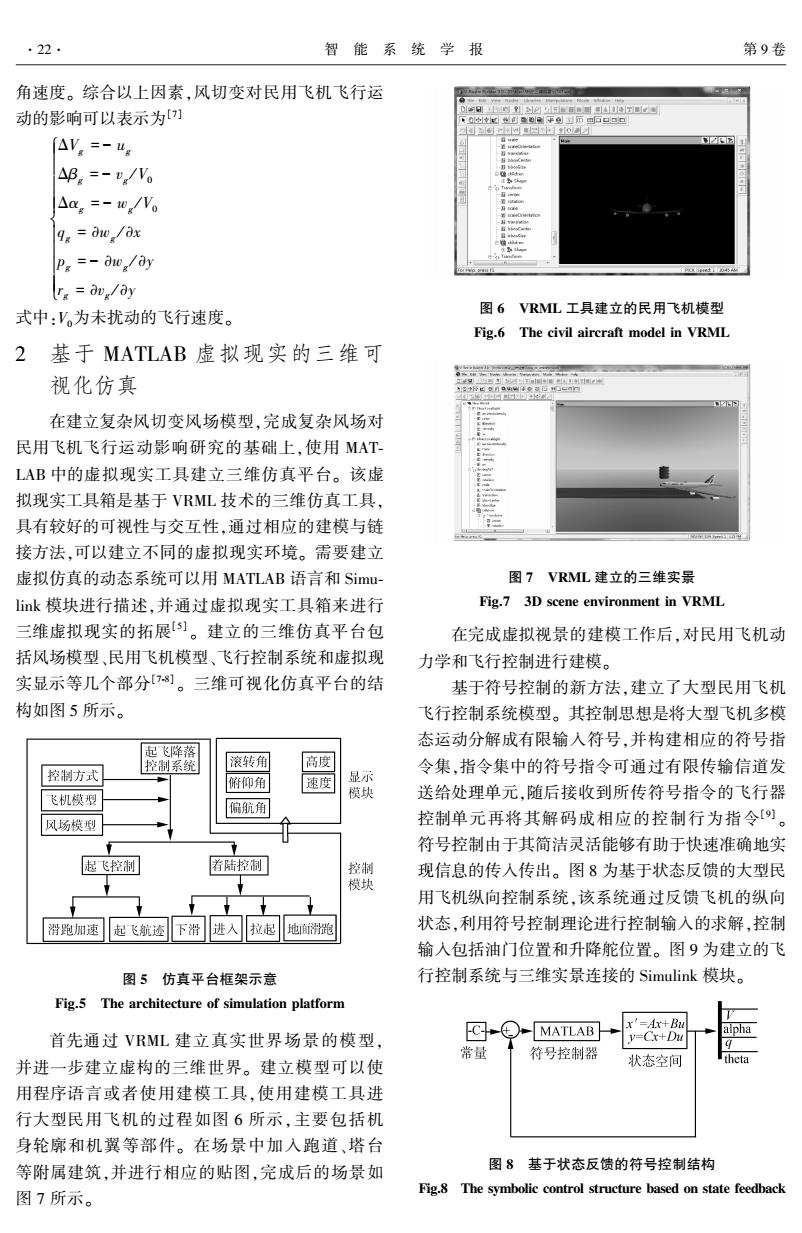
.22. 智能系统学报 第9卷 角速度。综合以上因素,风切变对民用飞机飞行运 动的影响可以表示为[) Da工到aa■■0 (AV:=-ux Z △B。=-v/V0 Aas =-w0/Vo 9g=0./ax Pe=-ow /ay rs=dv/ay 式中:V。为未扰动的飞行速度。 图6VRML工具建立的民用飞机模型 Fig.6 The civil aircraft model in VRML 2基于MATLAB虚拟现实的三维可 视化仿真 在建立复杂风切变风场模型,完成复杂风场对 民用飞机飞行运动影响研究的基础上,使用MAT LAB中的虚拟现实工具建立三维仿真平台。该虚 拟现实工具箱是基于VRML技术的三维仿真工具, 具有较好的可视性与交互性,通过相应的建模与链 接方法,可以建立不同的虚拟现实环境。需要建立 虚拟仿真的动态系统可以用MATLAB语言和Simu- 图7VRML建立的三维实景 lmk模块进行描述,并通过虚拟现实工具箱来进行 Fig.7 3D scene environment in VRML 三维虚拟现实的拓展)。建立的三维仿真平台包 在完成虚拟视景的建模工作后,对民用飞机动 括风场模型、民用飞机模型、飞行控制系统和虚拟现 力学和飞行控制进行建模。 实显示等几个部分[)】。三维可视化仿真平台的结 基于符号控制的新方法,建立了大型民用飞机 构如图5所示。 飞行控制系统模型。其控制思想是将大型飞机多模 态运动分解成有限输入符号,并构建相应的符号指 起飞降落 控制系统 滚转角 高度 控制方式 令集,指令集中的符号指令可通过有限传输信道发 俯仰角 速度 显示 飞机模型 模块 送给处理单元,随后接收到所传符号指令的飞行器 偏航角 风场模型 控制单元再将其解码成相应的控制行为指令[。 符号控制由于其简洁灵活能够有助于快速准确地实 起飞控制 者陆控制 控制 现信息的传入传出。图8为基于状态反馈的大型民 模块 用飞机纵向控制系统,该系统通过反馈飞机的纵向 滑跑加速起飞航迹下滑进入拉起地滑跑 状态,利用符号控制理论进行控制输入的求解,控制 输入包括油门位置和升降舵位置。图9为建立的飞 图5仿真平台框架示意 行控制系统与三维实景连接的Simulink模块。 Fig.5 The architecture of simulation platform x'=Ax+Bu alpha 首先通过VRML建立真实世界场景的模型, MATLAB y=Cx+Du 常量 符号控制器 并进一步建立虚构的三维世界。建立模型可以使 状态空间 theta 用程序语言或者使用建模工具,使用建模工具进 行大型民用飞机的过程如图6所示,主要包括机 身轮廓和机翼等部件。在场景中加入跑道、塔台 等附属建筑,并进行相应的贴图,完成后的场景如 图8基于状态反馈的符号控制结构 图7所示。 Fig.8 The symbolic control structure based on state feedback角速度。 综合以上因素,风切变对民用飞机飞行运 动的影响可以表示为[7] ΔVg = - ug Δβg = - vg / V0 Δαg = - wg / V0 qg = ∂wg / ∂x pg = - ∂wg / ∂y rg = ∂vg / ∂y ì î í ï ï ï ïï ï ï ï ï 式中:V0为未扰动的飞行速度。 2 基于 MATLAB 虚拟现实的三维可 视化仿真 在建立复杂风切变风场模型,完成复杂风场对 民用飞机飞行运动影响研究的基础上,使用 MAT⁃ LAB 中的虚拟现实工具建立三维仿真平台。 该虚 拟现实工具箱是基于 VRML 技术的三维仿真工具, 具有较好的可视性与交互性,通过相应的建模与链 接方法,可以建立不同的虚拟现实环境。 需要建立 虚拟仿真的动态系统可以用 MATLAB 语言和 Simu⁃ link 模块进行描述,并通过虚拟现实工具箱来进行 三维虚拟现实的拓展[5] 。 建立的三维仿真平台包 括风场模型、民用飞机模型、飞行控制系统和虚拟现 实显示等几个部分[7⁃8] 。 三维可视化仿真平台的结 构如图 5 所示。 图 5 仿真平台框架示意 Fig.5 The architecture of simulation platform 首先通过 VRML 建立真实世界场景的模型, 并进一步建立虚构的三维世界。 建立模型可以使 用程序语言或者使用建模工具,使用建模工具进 行大型民用飞机的过程如图 6 所示,主要包括机 身轮廓和机翼等部件。 在场景中加入跑道、塔台 等附属建筑,并进行相应的贴图,完成后的场景如 图 7 所示。 图 6 VRML 工具建立的民用飞机模型 Fig.6 The civil aircraft model in VRML 图 7 VRML 建立的三维实景 Fig.7 3D scene environment in VRML 在完成虚拟视景的建模工作后,对民用飞机动 力学和飞行控制进行建模。 基于符号控制的新方法,建立了大型民用飞机 飞行控制系统模型。 其控制思想是将大型飞机多模 态运动分解成有限输入符号,并构建相应的符号指 令集,指令集中的符号指令可通过有限传输信道发 送给处理单元,随后接收到所传符号指令的飞行器 控制单元再将其解码成相应的控制行为指令[9] 。 符号控制由于其简洁灵活能够有助于快速准确地实 现信息的传入传出。 图 8 为基于状态反馈的大型民 用飞机纵向控制系统,该系统通过反馈飞机的纵向 状态,利用符号控制理论进行控制输入的求解,控制 输入包括油门位置和升降舵位置。 图 9 为建立的飞 行控制系统与三维实景连接的 Simulink 模块。 图 8 基于状态反馈的符号控制结构 Fig.8 The symbolic control structure based on state feedback ·22· 智 能 系 统 学 报 第 9 卷