正在加载图片...
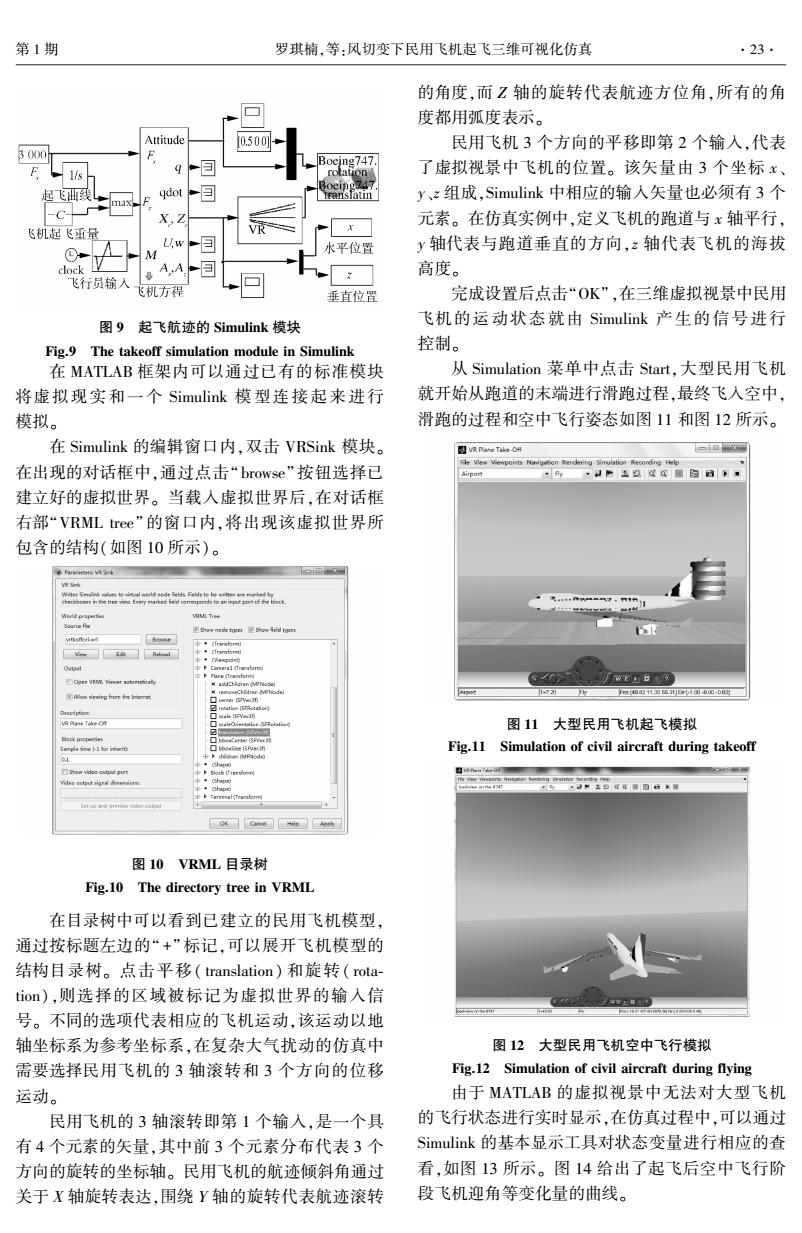
第1期 罗琪楠,等:风切变下民用飞机起飞三维可视化仿真 .23. 的角度,而Z轴的旋转代表航迹方位角,所有的角 度都用弧度表示。 Attitude 0.500 民用飞机3个方向的平移即第2个输入,代表 3000 F 目 Bocjng747. on 了虚拟视景中飞机的位置。该矢量由3个坐标x、 起飞出线, qdot-目 transfatin y、z组成,Simulink中相应的输入矢量也必须有3个 -C X.Z 元素。在仿真实例中,定义飞机的跑道与x轴平行, 飞机起飞重量 Uw曰 水平位置 y轴代表与跑道垂直的方向,z轴代表飞机的海拔 AA百 高度。 飞行员输入飞机方程 垂直位置 完成设置后点击“OK”,在三维虚拟视景中民用 图9起飞航迹的Simulink模块 飞机的运动状态就由Simulink产生的信号进行 Fig.9 The takeoff simulation module in Simulink 控制。 在MATLAB框架内可以通过已有的标准模块 从Simulation菜单中点击Start,大型民用飞机 将虚拟现实和一个Simulink模型连接起来进行 就开始从跑道的末端进行滑跑过程,最终飞入空中, 模拟。 滑跑的过程和空中飞行姿态如图11和图12所示。 在Simulink的编辑窗口内,双击VRSink模块。 在出现的对话框中,通过点击“browse'”按钮选择已 -Fy ,盖28g■目a■ 建立好的虚拟世界。当载入虚拟世界后,在对话框 右部“VRML tree”的窗口内,将出现该虚拟世界所 包含的结构(如图10所示)。 4 Paers线sd Word prope vthofloriwl n☐a☐Rd□ Qrut w正卫o VR Pe Take On wal-Oim 图11大型民用飞机起飞模拟 merm过女hert Fig.11 Simulation of civil aircraft during takeoff %e有de8 utput port pe的diyensor o圆国■园 图10VRML目录树 Fig.10 The directory tree in VRML 在目录树中可以看到已建立的民用飞机模型, 通过按标题左边的“+”标记,可以展开飞机模型的 结构目录树。点击平移(translation)和旋转(rota- ion),则选择的区域被标记为虚拟世界的输入信 号。不同的选项代表相应的飞机运动,该运动以地 轴坐标系为参考坐标系,在复杂大气扰动的仿真中 图12大型民用飞机空中飞行模拟 需要选择民用飞机的3轴滚转和3个方向的位移 Fig.12 Simulation of civil aircraft during flying 运动。 由于MATLAB的虚拟视景中无法对大型飞机 民用飞机的3轴滚转即第1个输入,是一个具 的飞行状态进行实时显示,在仿真过程中,可以通过 有4个元素的矢量,其中前3个元素分布代表3个 Simulink的基本显示工具对状态变量进行相应的查 方向的旋转的坐标轴。民用飞机的航迹倾斜角通过 看,如图13所示。图14给出了起飞后空中飞行阶 关于X轴旋转表达,围绕Y轴的旋转代表航迹滚转 段飞机迎角等变化量的曲线。图 9 起飞航迹的 Simulink 模块 Fig.9 The takeoff simulation module in Simulink 在 MATLAB 框架内可以通过已有的标准模块 将虚拟现实和一个 Simulink 模型连接起来进行 模拟。 在 Simulink 的编辑窗口内,双击 VRSink 模块。 在出现的对话框中,通过点击“ browse”按钮选择已 建立好的虚拟世界。 当载入虚拟世界后,在对话框 右部“VRML tree” 的窗口内,将出现该虚拟世界所 包含的结构(如图 10 所示)。 图 10 VRML 目录树 Fig.10 The directory tree in VRML 在目录树中可以看到已建立的民用飞机模型, 通过按标题左边的“ +”标记,可以展开飞机模型的 结构目录树。 点击平移( translation) 和旋转( rota⁃ tion),则选择的区域被标记为虚拟世界的输入信 号。 不同的选项代表相应的飞机运动,该运动以地 轴坐标系为参考坐标系,在复杂大气扰动的仿真中 需要选择民用飞机的 3 轴滚转和 3 个方向的位移 运动。 民用飞机的 3 轴滚转即第 1 个输入,是一个具 有 4 个元素的矢量,其中前 3 个元素分布代表 3 个 方向的旋转的坐标轴。 民用飞机的航迹倾斜角通过 关于 X 轴旋转表达,围绕 Y 轴的旋转代表航迹滚转 的角度,而 Z 轴的旋转代表航迹方位角,所有的角 度都用弧度表示。 民用飞机 3 个方向的平移即第 2 个输入,代表 了虚拟视景中飞机的位置。 该矢量由 3 个坐标 x、 y、z 组成,Simulink 中相应的输入矢量也必须有 3 个 元素。 在仿真实例中,定义飞机的跑道与 x 轴平行, y 轴代表与跑道垂直的方向,z 轴代表飞机的海拔 高度。 完成设置后点击“OK”,在三维虚拟视景中民用 飞机的运动状态就由 Simulink 产生的信号进行 控制。 从 Simulation 菜单中点击 Start,大型民用飞机 就开始从跑道的末端进行滑跑过程,最终飞入空中, 滑跑的过程和空中飞行姿态如图 11 和图 12 所示。 图 11 大型民用飞机起飞模拟 Fig.11 Simulation of civil aircraft during takeoff 图 12 大型民用飞机空中飞行模拟 Fig.12 Simulation of civil aircraft during flying 由于 MATLAB 的虚拟视景中无法对大型飞机 的飞行状态进行实时显示,在仿真过程中,可以通过 Simulink 的基本显示工具对状态变量进行相应的查 看,如图 13 所示。 图 14 给出了起飞后空中飞行阶 段飞机迎角等变化量的曲线。 第 1 期 罗琪楠,等:风切变下民用飞机起飞三维可视化仿真 ·23·