正在加载图片...
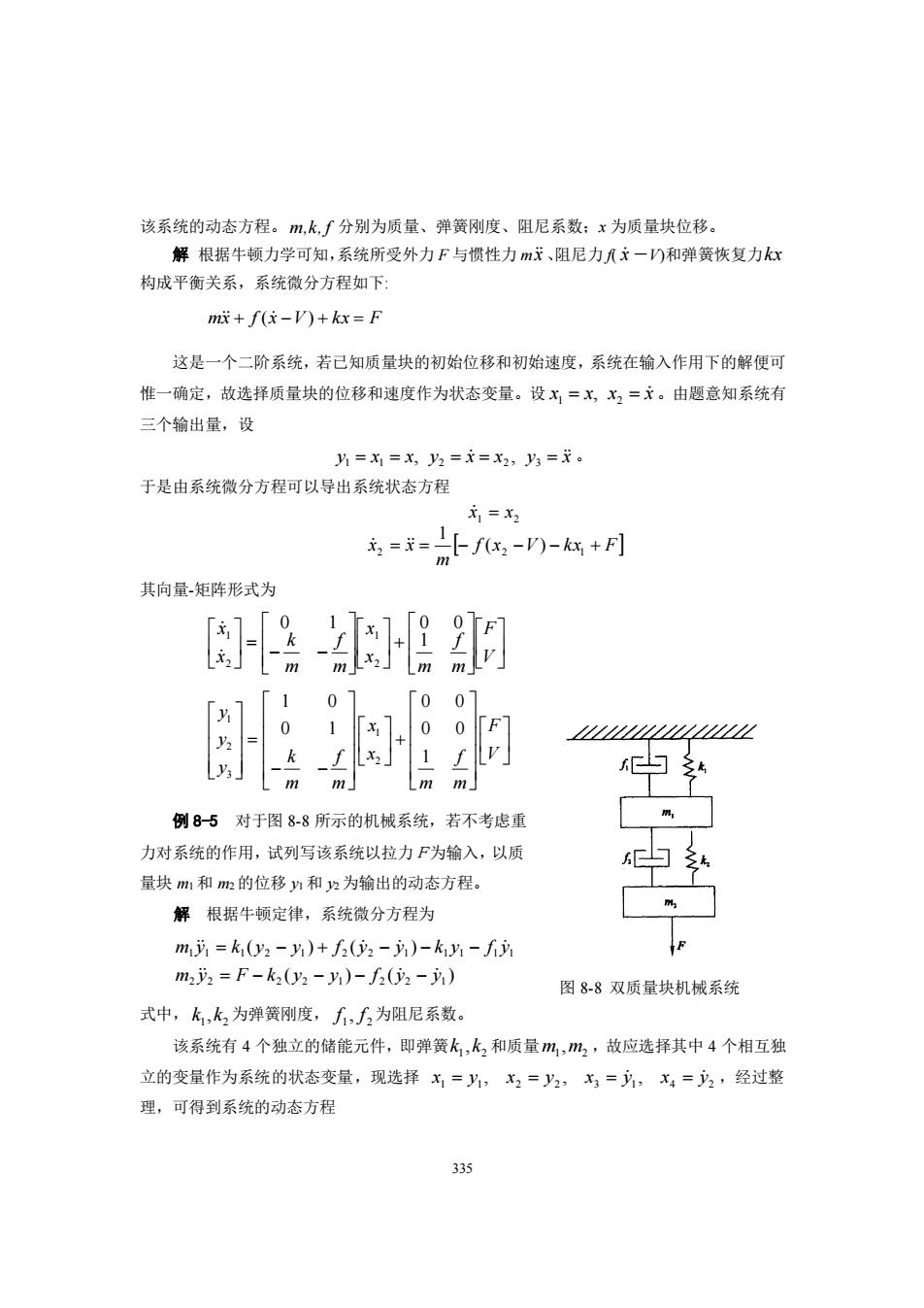
该系统的动态方程。m,k,∫分别为质量、弹簧刚度、阻尼系数:x为质量块位移 解根据牛顿力学可知,系统所受外力F与惯性力m、阻尼力(文一门和弹簧恢复力kx 构成平衡关系,系统微分方程如下 m成+f(依-+kx=F 这是一个二阶系统,若已知质量块的初始位移和初始速度,系统在输入作用下的解便可 惟一确定,故选择质量块的位移和速度作为状态变量。设x=x,x=产。由题意知系统有 三个输出量,设 ==x,==x2,=求。 于是由系统微分方程可以导出系统状态方程 名=-n-+月 其向量矩阵形式为 0 00 例日5对于图8-8所示的机械系统,若不考虑重 力对系统的作用,试列写该系统以拉力F为输入,以质 量块m:和的位移和2为输出的动态方程。 解根据牛顿定律,系统微分方程为 m=k(y-)+f2(2-)-ky- m2j3=F-k(0y3-)-f(y2-j) 图8-8双质量块机械系统 式中,k,k为弹簧刚度,才为阻尼系数 该系统有4个独立的储能元件,即弹簧k,k和质量m,m2,故应选择其中4个相互独 立的变量作为系统的状态变量,现选择出=,x=少2,x=头,x=少2,经过整 理,可得到系统的动态方程335 图 8-8 双质量块机械系统 该系统的动态方程。 m,k, f 分别为质量、弹簧刚度、阻尼系数;x 为质量块位移。 解 根据牛顿力学可知,系统所受外力 F 与惯性力 m x 、阻尼力 f( x -V)和弹簧恢复力 kx 构成平衡关系,系统微分方程如下: m x + f (x −V) + kx = F 这是一个二阶系统,若已知质量块的初始位移和初始速度,系统在输入作用下的解便可 惟一确定,故选择质量块的位移和速度作为状态变量。设 x = x x = x 1 2 , 。由题意知系统有 三个输出量,设 y = x = x y = x = x y = x 1 1 2 2 3 , , 。 于是由系统微分方程可以导出系统状态方程 f x V k x F m x x x x = = − − − + = 2 2 1 1 2 ( ) 1 其向量-矩阵形式为 + − − = V F m f m x x m f m k x x 1 0 1 0 0 2 1 2 1 1 1 2 2 3 1 0 0 0 0 1 0 0 1 y x F y k f f x V y m m m m = + − − 例 8-5 对于图 8-8 所示的机械系统,若不考虑重 力对系统的作用,试列写该系统以拉力F为输入,以质 量块 m1 和 m2 的位移 y1 和 y2 为输出的动态方程。 解 根据牛顿定律,系统微分方程为 ( ) ( ) ( ) ( ) 2 2 2 2 1 2 2 1 1 1 1 2 1 2 2 1 1 1 1 1 m y F k y y f y y m y k y y f y y k y f y = − − − − = − + − − − 式中, 1 2 k ,k 为弹簧刚度, 1 2 f , f 为阻尼系数。 该系统有 4 个独立的储能元件,即弹簧 1 2 k ,k 和质量 1 2 m ,m ,故应选择其中 4 个相互独 立的变量作为系统的状态变量,现选择 1 1 2 2 3 1 4 2 x = y , x = y , x = y , x = y ,经过整 理,可得到系统的动态方程