正在加载图片...
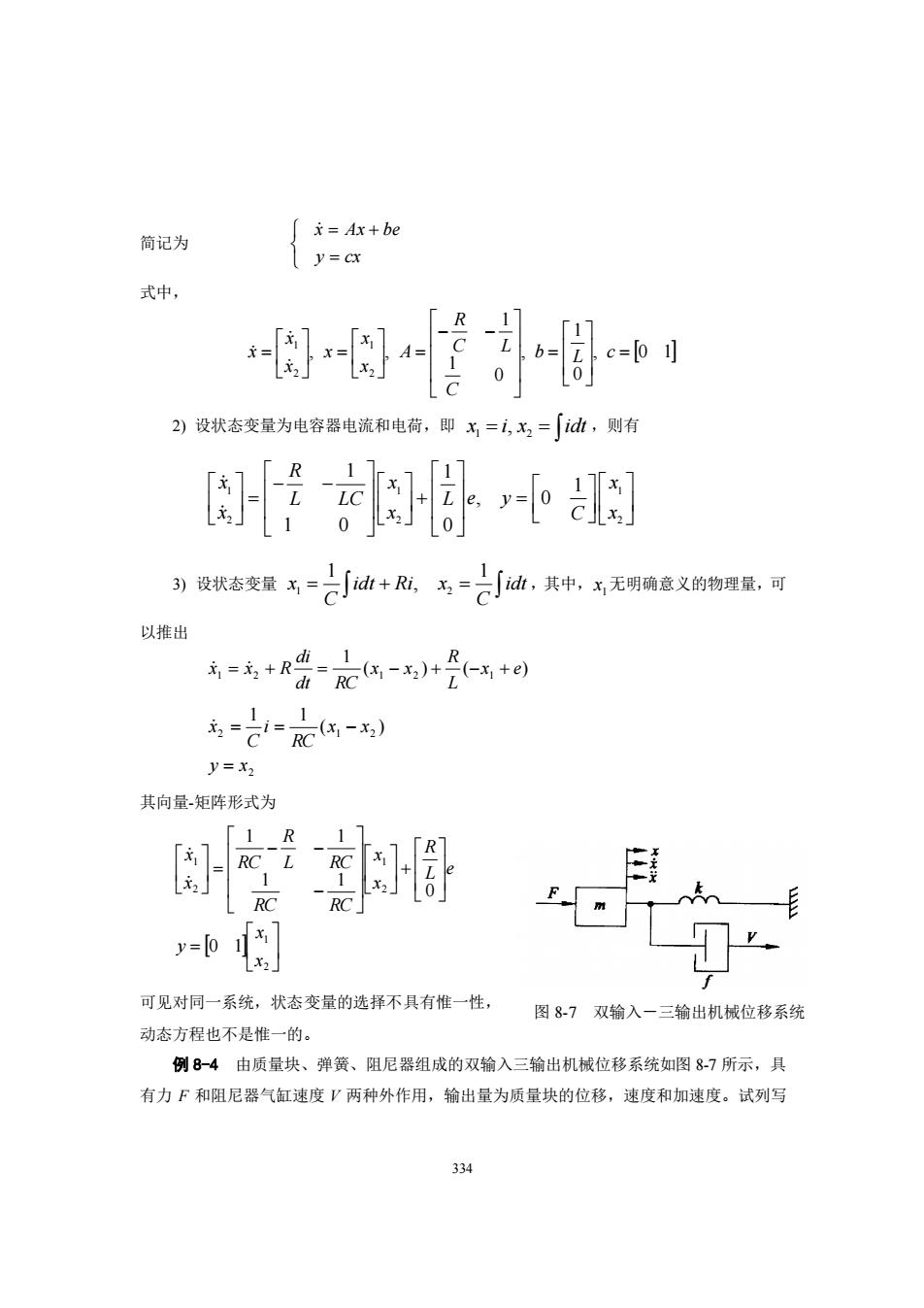
简记为 ∫=A+be y=cx 式中, 2)设状态变量为电容器电流和电荷,即X=i,为=∫id,则有 卧得中 以推出 y=x 其向量矩阵形式为 RC-- 1 RC RC. 可见对同一系统,状态变量的选择不具有惟一性, 图87双输入一三输出机械位移系统 动态方程也不是惟一的。 例8-4由质量块、弹簧、阻尼器组成的双输入三输出机械位移系统如图8-7所示,具 有力F和阻尼器气缸速度V两种外作用,输出量为质量块的位移,速度和加速度。试列写 334 334 图 8-7 双输入-三输出机械位移系统 简记为 y cx x Ax be = = + 式中, , 0 1 0 1 , 0 1 1 , , 2 1 2 1 = = − − = = = b L c C C L R A x x x x x x 2) 设状态变量为电容器电流和电荷,即 1 2 x i x idt = = , ,则有 1 1 1 2 2 2 1 1 1 , 0 1 0 0 R x x x L LC L e y x x x C − − = + = 3) 设状态变量 1 2 1 1 x idt Ri x idt , C C = + = ,其中, 1 x 无明确意义的物理量,可 以推出 ( ) ( ) 1 1 2 1 2 1 x e L R x x dt RC di x = x + R = − + − + 2 2 1 2 ( ) 1 1 y x x x RC i C x = = = − 其向量-矩阵形式为 = + − − − = 2 1 2 1 2 1 0 1 0 1 1 1 1 x x y L e R x x RC RC L RC R RC x x 可见对同一系统,状态变量的选择不具有惟一性, 动态方程也不是惟一的。 例 8-4 由质量块、弹簧、阻尼器组成的双输入三输出机械位移系统如图 8-7 所示,具 有力 F 和阻尼器气缸速度 V 两种外作用,输出量为质量块的位移,速度和加速度。试列写