正在加载图片...
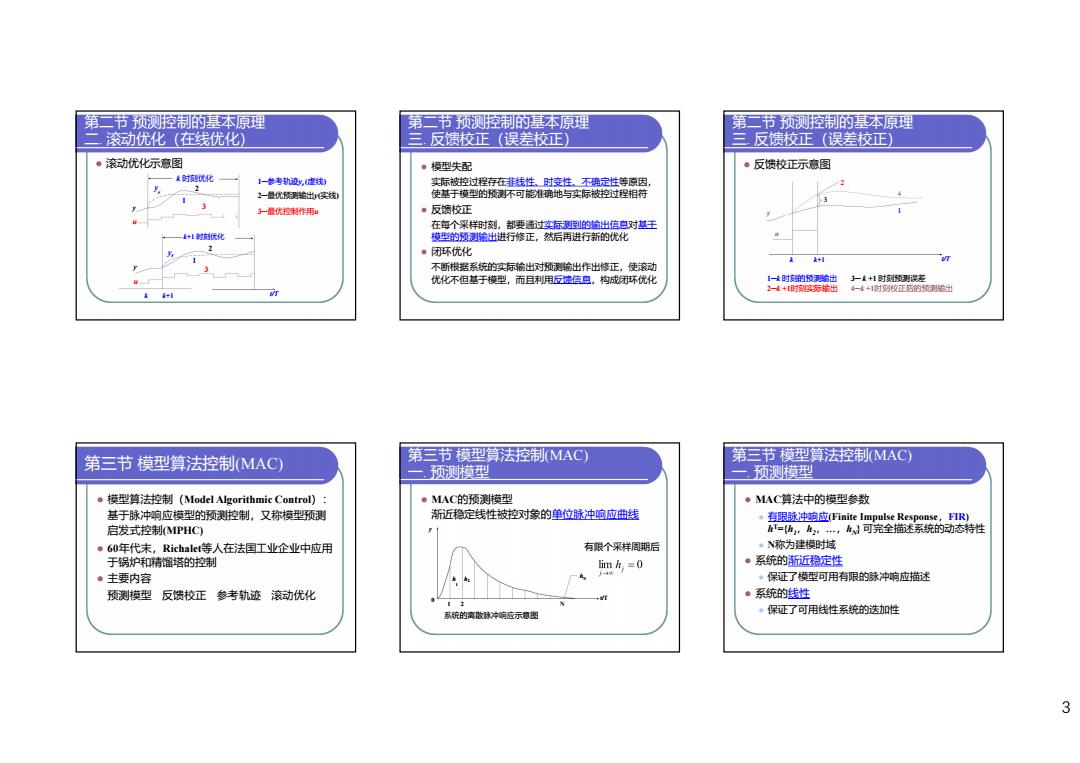
第二节预测控制的基本原理 第二节预测控制的基本原理 第二节预测控制的基本原理 二滚动优化(在线优化) 三,反馈校正(误差校正) 三反馈校正(误差校正) ·滚动优化示意图 。模型失配 ·反馈校正示意图 一。时刻优化 1一参考轨迹y,虚线) 实际被控过程存在非线性、时变性,不确定性等原因, 2 一最优测验出实线) 使基于模型的倾测不可能准确地与实际被控过程相符 3 3一最优控制作用山 。反馈校正 在每个采样时刻,都变通过止实标测到的地出信息对基王 横型的预测输出进行修正,然后再进行新的优化 ·闭环优化 不断根据系统的实际输出对预刻输出作出修正,使滚动 优化不但基于模型,而且利用反继信息,构成闭环优化 -时京的预蛇出3一量+1时测误差 14+1时刺输出 4一上+1时刻校正后的预测绘出 + 第三节模型算法控制(MAC) 第三节模型算法控制MAC 第三节模型算法控制(MAC 一预测模型 一预测模型 。模型算法控制(Model Algorithmic Control): 。MAC的预测模型 。MAC算法中的模型参数 基于脉冲响应模型的预测控制,又称模型预测测 新近稳定线性被控对家的单位脉冲咽应曲线 ,有限脉冲跑应Finite Impulse Response,FIR) 启发式控制MPHC) =h,A,,h可完全描述系统的动态待性 。60年代末,Richalet等人在法国工业企业中应用 有限个采样周期后 ,N称为建模时域 于锅炉和精馏塔的控制 im in =0 ·系统的渐近稳定性 。主要内容 。保证了模型可用有限的脉冲响应描述 预测模型反馈校正参考轨迹滚动优化 ·系统的线性 系统的离散球冲响应示意图 ,保证了可用线性系统的迭加性 33 第二节 预测控制的基本原理 二. 滚动优化(在线优化) 滚动优化示意图 k 时刻优化 1─参考轨迹y (虚线) r y 2 r 2─最优预测输出y(实线) 1 y 3 3─最优控制作用u u k+1 时刻优化 2 yr 1 3 yu k k+1 t/T 第二节 预测控制的基本原理 三. 反馈校正(误差校正) 模型失配 实际被控过程存在非线性、时变性、不确定性等原因, 使基于模型的预测不可能准确地与实际被控过程相符 反馈校正 在每个采样时刻,都要通过实际测到的输出信息对基于 模型的预测输出进行修正,然后再进行新的优化 闭环优化 不断根据系统的实际输出对预测输出作出修正,使滚动 优化不但基于模型,而且利用反馈信息,构成闭环优化 第二节 预测控制的基本原理 三. 反馈校正(误差校正) 反馈校正示意图 2 4 3 1 y u k k+1 t/T 1─k 时刻的预测输出 3─ k +1 时刻预测误差 2─k +1时刻实际输出 4─k +1时刻校正后的预测输出 第三节 模型算法控制(MAC) 模型算法控制(Model Algorithmic Control): 基于脉冲响应模型的预测控制,又称模型预测 启发式控制(MPHC) 60年代末,Richalet等人在法国工业企业中应用 于锅炉和精馏塔的控制 主要内容 预测模型 反馈校正 参考轨迹 滚动优化 第三节 模型算法控制(MAC) 一. 预测模型 MAC的预测模型 渐近稳定线性被控对象的单位脉冲响应曲线 y 有限个采样周期后 j h h hN 2 1 0 t/T 1 2 N 系统的离散脉冲响应示意图 第三节 模型算法控制(MAC) 一. 预测模型 MAC算法中的模型参数 有限脉冲响应(Finite Impulse Response,FIR) hT={h1 2 N ,h ,…,h } 可完全描述系统的动态特性 N称为建模时域 系统的渐近稳定性 保证了模型可用有限的脉冲响应描述 系统的线性 保证了可用线性系统的迭加性