正在加载图片...
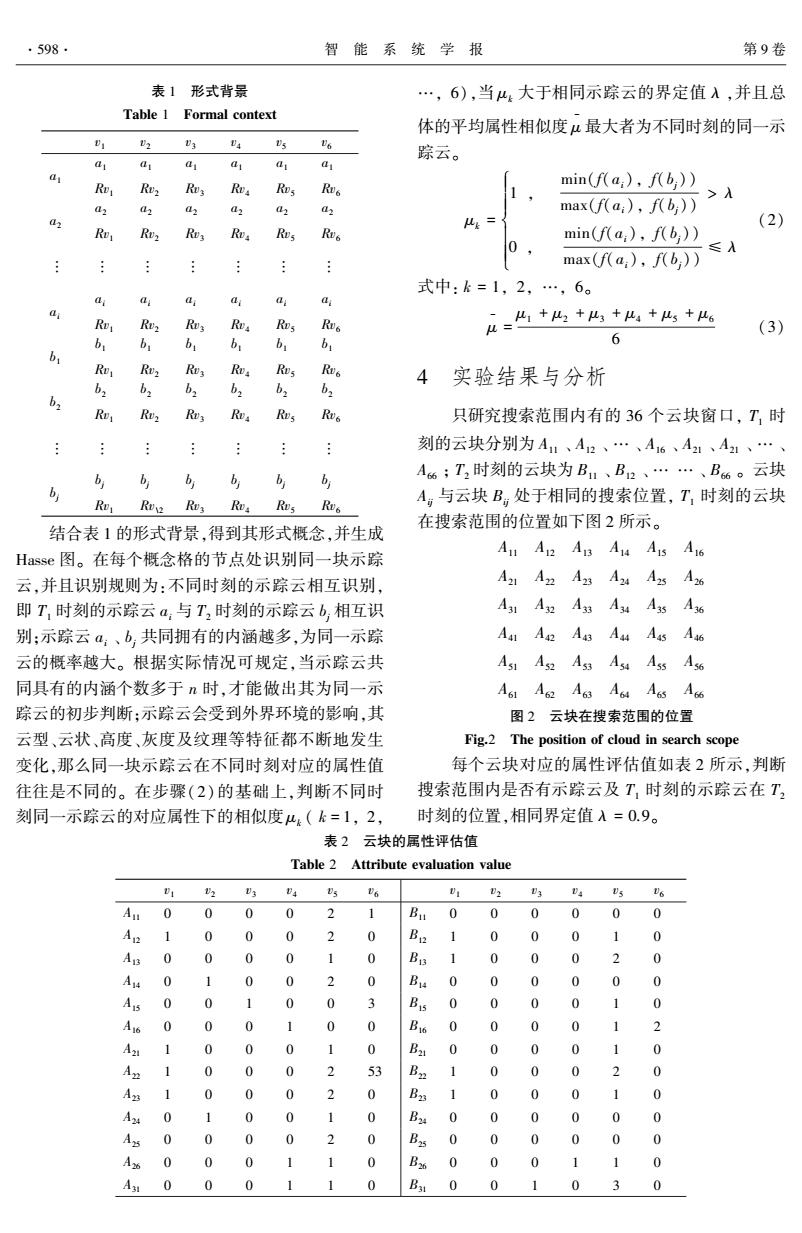
.598. 智能系统学报 第9卷 表1形式背景 …,6),当44大于相同示踪云的界定值入,并且总 Table 1 Formal context 体的平均属性相似度μ最大者为不同时刻的同一示 2 U4 Us 6 踪云。 aa a1 min(f(a;),f(b;)) >A 02 d2 max(f(a:),f(b;)) = (2) Re Re Rv6 0 min(fa:),f(b)) max(f(a;),f(b;)) 式中:k=1,2,…,6。 a G =+A++,+A+A (3) b by 6 Rv6 4实验结果与分析 b, b2 Rvs 只研究搜索范围内有的36个云块窗口,T,时 刻的云块分别为A1、A2、…、A6、A2、A21、…、 b 6 b b b 6 A6;T2时刻的云块为B1、B2、……、B6。云块 A,与云块B:处于相同的搜索位置,T,时刻的云块 结合表1的形式背景,得到其形式概念,并生成 在搜索范围的位置如下图2所示。 Hasse图。在每个概念格的节点处识别同一块示踪 A11 A12 A13 A14 A15 A16 云,并且识别规则为:不同时刻的示踪云相互识别, A21A2A23A24A25A26 即T,时刻的示踪云a:与T,时刻的示踪云b,相互识 A31A2A3A34A35A6 别;示踪云a:、b:共同拥有的内涵越多,为同一示踪 A41A42A43A44A45A6 云的概率越大。根据实际情况可规定,当示踪云共 As1 As2 A53 Asa Ass As6 同具有的内涵个数多于n时,才能做出其为同一示 A61 A62 A63 A64 A65 A6 踪云的初步判断:示踪云会受到外界环境的影响,其 图2云块在搜索范围的位置 云型、云状、高度、灰度及纹理等特征都不断地发生 Fig.2 The position of cloud in search scope 变化,那么同一块示踪云在不同时刻对应的属性值 每个云块对应的属性评估值如表2所示,判断 往往是不同的。在步骤(2)的基础上,判断不同时 搜索范围内是否有示踪云及T,时刻的示踪云在T, 刻同一示踪云的对应属性下的相似度:(k=1,2, 时刻的位置,相同界定值入=0.9。 表2云块的属性评估值 Table 2 Attribute evaluation value A0 0 0 0 2 1 B1 0 0 0 0 0 0 0 0 0 2 0 Be 0 0 0 1 0 An 0 0 0 0 0 Bi 1 0 0 0 2 0 A1 0 0 0 B14 0 0 0 0 0 Ais 0 0 1 0 A16 0 B16 0 0 1 2 1 0 0 2 0 An 0 A24 0 0 0 ( 0 0 0 0 B26 0 0 0 1 1 0 0 0 0 0 B31 0 0 1 03 0表 1 形式背景 Table 1 Formal context v1 v2 v3 v4 v5 v6 a1 a1 Rv1 a1 Rv2 a1 Rv3 a1 Rv4 a1 Rv5 a1 Rv6 a2 a2 Rv1 a2 Rv2 a2 Rv3 a2 Rv4 a2 Rv5 a2 Rv6 ︙ ︙ ︙ ︙ ︙ ︙ ︙ ai ai Rv1 ai Rv2 ai Rv3 ai Rv4 ai Rv5 ai Rv6 b1 b1 Rv1 b1 Rv2 b1 Rv3 b1 Rv4 b1 Rv5 b1 Rv6 b2 b2 Rv1 b2 Rv2 b2 Rv3 b2 Rv4 b2 Rv5 b2 Rv6 ︙ ︙ ︙ ︙ ︙ ︙ ︙ bj bj Rv1 bj Rv\2 bj Rv3 bj Rv4 bj Rv5 bj Rv6 结合表 1 的形式背景,得到其形式概念,并生成 Hasse 图。 在每个概念格的节点处识别同一块示踪 云,并且识别规则为:不同时刻的示踪云相互识别, 即 T1 时刻的示踪云 ai 与 T2 时刻的示踪云 bj 相互识 别;示踪云 ai 、 bj 共同拥有的内涵越多,为同一示踪 云的概率越大。 根据实际情况可规定,当示踪云共 同具有的内涵个数多于 n 时,才能做出其为同一示 踪云的初步判断;示踪云会受到外界环境的影响,其 云型、云状、高度、灰度及纹理等特征都不断地发生 变化,那么同一块示踪云在不同时刻对应的属性值 往往是不同的。 在步骤(2)的基础上,判断不同时 刻同一示踪云的对应属性下的相似度 μk ( k = 1, 2, …, 6),当 μk 大于相同示踪云的界定值 λ ,并且总 体的平均属性相似度 μ - 最大者为不同时刻的同一示 踪云。 μk = 1 , min(f(ai), f(bj)) max(f(ai), f(bj)) > λ 0 , min(f(ai), f(bj)) max(f(ai), f(bj)) ≤ λ ì î í ï ïï ï ïï (2) 式中: k = 1, 2, …, 6。 μ - = μ1 + μ2 + μ3 + μ4 + μ5 + μ6 6 (3) 4 实验结果与分析 只研究搜索范围内有的 36 个云块窗口, T1 时 刻的云块分别为 A11 、 A12 、 … 、 A16 、 A21 、 A21 、 … 、 A66 ; T2 时刻的云块为 B11 、 B12 、 … … 、 B66 。 云块 Aij 与云块 Bij 处于相同的搜索位置, T1 时刻的云块 在搜索范围的位置如下图 2 所示。 A11 A12 A13 A14 A15 A16 A21 A22 A23 A24 A25 A26 A31 A32 A33 A34 A35 A36 A41 A42 A43 A44 A45 A46 A51 A52 A53 A54 A55 A56 A61 A62 A63 A64 A65 A66 图 2 云块在搜索范围的位置 Fig.2 The position of cloud in search scope 每个云块对应的属性评估值如表 2 所示,判断 搜索范围内是否有示踪云及 T1 时刻的示踪云在 T2 时刻的位置,相同界定值 λ = 0.9。 表 2 云块的属性评估值 Table 2 Attribute evaluation value v1 v2 v3 v4 v5 v6 v1 v2 v3 v4 v5 v6 A11 0 0 0 0 2 1 B11 0 0 0 0 0 0 A12 1 0 0 0 2 0 B12 1 0 0 0 1 0 A13 0 0 0 0 1 0 B13 1 0 0 0 2 0 A14 0 1 0 0 2 0 B14 0 0 0 0 0 0 A15 0 0 1 0 0 3 B15 0 0 0 0 1 0 A16 0 0 0 1 0 0 B16 0 0 0 0 1 2 A21 1 0 0 0 1 0 B21 0 0 0 0 1 0 A22 1 0 0 0 2 53 B22 1 0 0 0 2 0 A23 1 0 0 0 2 0 B23 1 0 0 0 1 0 A24 0 1 0 0 1 0 B24 0 0 0 0 0 0 A25 0 0 0 0 2 0 B25 0 0 0 0 0 0 A26 0 0 0 1 1 0 B26 0 0 0 1 1 0 A31 0 0 0 1 1 0 B31 0 0 1 0 3 0 ·598· 智 能 系 统 学 报 第 9 卷