正在加载图片...
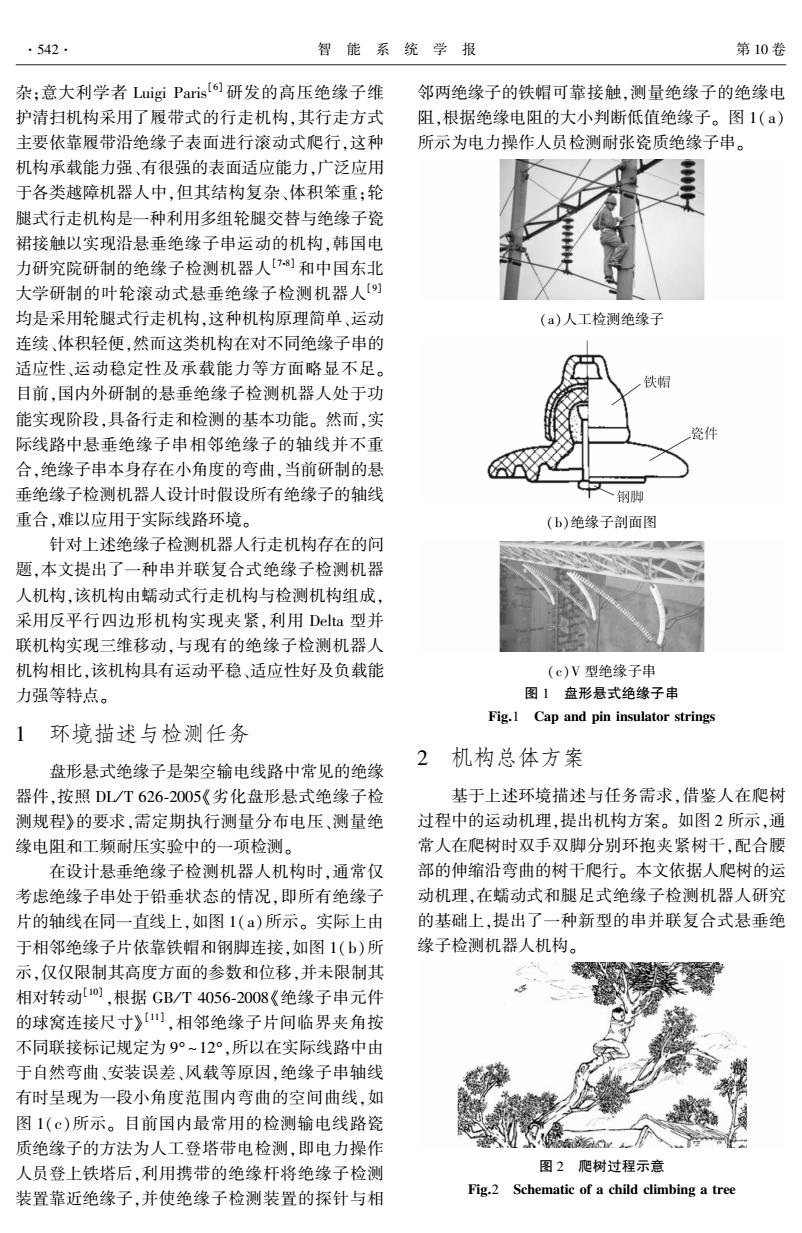
.542. 智能系统学报 第10卷 杂;意大利学者Luigi Paris)研发的高压绝缘子维 邻两绝缘子的铁帽可靠接触,测量绝缘子的绝缘电 护清扫机构采用了履带式的行走机构,其行走方式 阻,根据绝缘电阻的大小判断低值绝缘子。图1(a) 主要依靠履带沿绝缘子表面进行滚动式爬行,这种 所示为电力操作人员检测耐张瓷质绝缘子串。 机构承载能力强、有很强的表面适应能力,广泛应用 于各类越障机器人中,但其结构复杂、体积笨重:轮 腿式行走机构是一种利用多组轮腿交替与绝缘子瓷 裙接触以实现沿悬垂绝缘子串运动的机构,韩国电 力研究院研制的绝缘子检测机器人[)和中国东北 大学研制的叶轮滚动式悬垂绝缘子检测机器人) 均是采用轮腿式行走机构,这种机构原理简单、运动 (a)人工检测绝缘子 连续、体积轻便,然而这类机构在对不同绝缘子串的 适应性、运动稳定性及承载能力等方面略显不足。 铁帽 目前,国内外研制的悬垂绝缘子检测机器人处于功 能实现阶段,具备行走和检测的基本功能。然而,实 瓷件 际线路中悬垂绝缘子串相邻绝缘子的轴线并不重 合,绝缘子串本身存在小角度的弯曲,当前研制的悬 垂绝缘子检测机器人设计时假设所有绝缘子的轴线 、钢脚 重合,难以应用于实际线路环境。 (b)绝缘子剖面图 针对上述绝缘子检测机器人行走机构存在的问 题,本文提出了一种串并联复合式绝缘子检测机器 人机构,该机构由蠕动式行走机构与检测机构组成, 采用反平行四边形机构实现夹紧,利用Deta型并 联机构实现三维移动,与现有的绝缘子检测机器人 机构相比,该机构具有运动平稳、适应性好及负载能 (c)V型绝缘子串 力强等特点。 图1盘形悬式绝缘子串 Fig.1 Cap and pin insulator strings 1环境描述与检测任务 2机构总体方案 盘形悬式绝缘子是架空输电线路中常见的绝缘 器件,按照DL/T626-2005《劣化盘形悬式绝缘子检 基于上述环境描述与任务需求,借鉴人在爬树 测规程》的要求,需定期执行测量分布电压、测量绝 过程中的运动机理,提出机构方案。如图2所示,通 缘电阻和工频耐压实验中的一项检测。 常人在爬树时双手双脚分别环抱夹紧树干,配合腰 在设计悬垂绝缘子检测机器人机构时,通常仅 部的伸缩沿弯曲的树干爬行。本文依据人爬树的运 考虑绝缘子串处于铅垂状态的情况,即所有绝缘子 动机理,在蠕动式和腿足式绝缘子检测机器人研究 片的轴线在同一直线上,如图1(a)所示。实际上由 的基础上,提出了一种新型的串并联复合式悬垂绝 于相邻绝缘子片依靠铁帽和钢脚连接,如图1(b)所 缘子检测机器人机构。 示,仅仅限制其高度方面的参数和位移,并未限制其 相对转动[o,根据GB/T4056-2008《绝缘子串元件 的球窝连接尺寸》山,相邻绝缘子片间临界夹角按 不同联接标记规定为9°~12°,所以在实际线路中由 于自然弯曲、安装误差、风载等原因,绝缘子串轴线 有时呈现为一段小角度范围内弯曲的空间曲线,如 图1(c)所示。目前国内最常用的检测输电线路瓷 质绝缘子的方法为人工登塔带电检测,即电力操作 人员登上铁塔后,利用携带的绝缘杆将绝缘子检测 图2爬树过程示意 装置靠近绝缘子,并使绝缘子检测装置的探针与相 Fig.2 Schematic of a child climbing a tree杂;意大利学者 Luigi Paris [6] 研发的高压绝缘子维 护清扫机构采用了履带式的行走机构,其行走方式 主要依靠履带沿绝缘子表面进行滚动式爬行,这种 机构承载能力强、有很强的表面适应能力,广泛应用 于各类越障机器人中,但其结构复杂、体积笨重;轮 腿式行走机构是一种利用多组轮腿交替与绝缘子瓷 裙接触以实现沿悬垂绝缘子串运动的机构,韩国电 力研究院研制的绝缘子检测机器人[7⁃8] 和中国东北 大学研制的叶轮滚动式悬垂绝缘子检测机器人[9] 均是采用轮腿式行走机构,这种机构原理简单、运动 连续、体积轻便,然而这类机构在对不同绝缘子串的 适应性、运动稳定性及承载能力等方面略显不足。 目前,国内外研制的悬垂绝缘子检测机器人处于功 能实现阶段,具备行走和检测的基本功能。 然而,实 际线路中悬垂绝缘子串相邻绝缘子的轴线并不重 合,绝缘子串本身存在小角度的弯曲,当前研制的悬 垂绝缘子检测机器人设计时假设所有绝缘子的轴线 重合,难以应用于实际线路环境。 针对上述绝缘子检测机器人行走机构存在的问 题,本文提出了一种串并联复合式绝缘子检测机器 人机构,该机构由蠕动式行走机构与检测机构组成, 采用反平行四边形机构实现夹紧,利用 Delta 型并 联机构实现三维移动,与现有的绝缘子检测机器人 机构相比,该机构具有运动平稳、适应性好及负载能 力强等特点。 1 环境描述与检测任务 盘形悬式绝缘子是架空输电线路中常见的绝缘 器件,按照 DL / T 626⁃2005《劣化盘形悬式绝缘子检 测规程》的要求,需定期执行测量分布电压、测量绝 缘电阻和工频耐压实验中的一项检测。 在设计悬垂绝缘子检测机器人机构时,通常仅 考虑绝缘子串处于铅垂状态的情况,即所有绝缘子 片的轴线在同一直线上,如图 1(a)所示。 实际上由 于相邻绝缘子片依靠铁帽和钢脚连接,如图 1(b)所 示,仅仅限制其高度方面的参数和位移,并未限制其 相对转动[10] ,根据 GB / T 4056⁃2008《绝缘子串元件 的球窝连接尺寸》 [11] ,相邻绝缘子片间临界夹角按 不同联接标记规定为 9° ~12°,所以在实际线路中由 于自然弯曲、安装误差、风载等原因,绝缘子串轴线 有时呈现为一段小角度范围内弯曲的空间曲线,如 图 1(c)所示。 目前国内最常用的检测输电线路瓷 质绝缘子的方法为人工登塔带电检测,即电力操作 人员登上铁塔后,利用携带的绝缘杆将绝缘子检测 装置靠近绝缘子,并使绝缘子检测装置的探针与相 邻两绝缘子的铁帽可靠接触,测量绝缘子的绝缘电 阻,根据绝缘电阻的大小判断低值绝缘子。 图 1(a) 所示为电力操作人员检测耐张瓷质绝缘子串。 (a)人工检测绝缘子 (b)绝缘子剖面图 (c)V 型绝缘子串 图 1 盘形悬式绝缘子串 Fig.1 Cap and pin insulator strings 2 机构总体方案 基于上述环境描述与任务需求,借鉴人在爬树 过程中的运动机理,提出机构方案。 如图 2 所示,通 常人在爬树时双手双脚分别环抱夹紧树干,配合腰 部的伸缩沿弯曲的树干爬行。 本文依据人爬树的运 动机理,在蠕动式和腿足式绝缘子检测机器人研究 的基础上,提出了一种新型的串并联复合式悬垂绝 缘子检测机器人机构。 图 2 爬树过程示意 Fig.2 Schematic of a child climbing a tree ·542· 智 能 系 统 学 报 第 10 卷