正在加载图片...
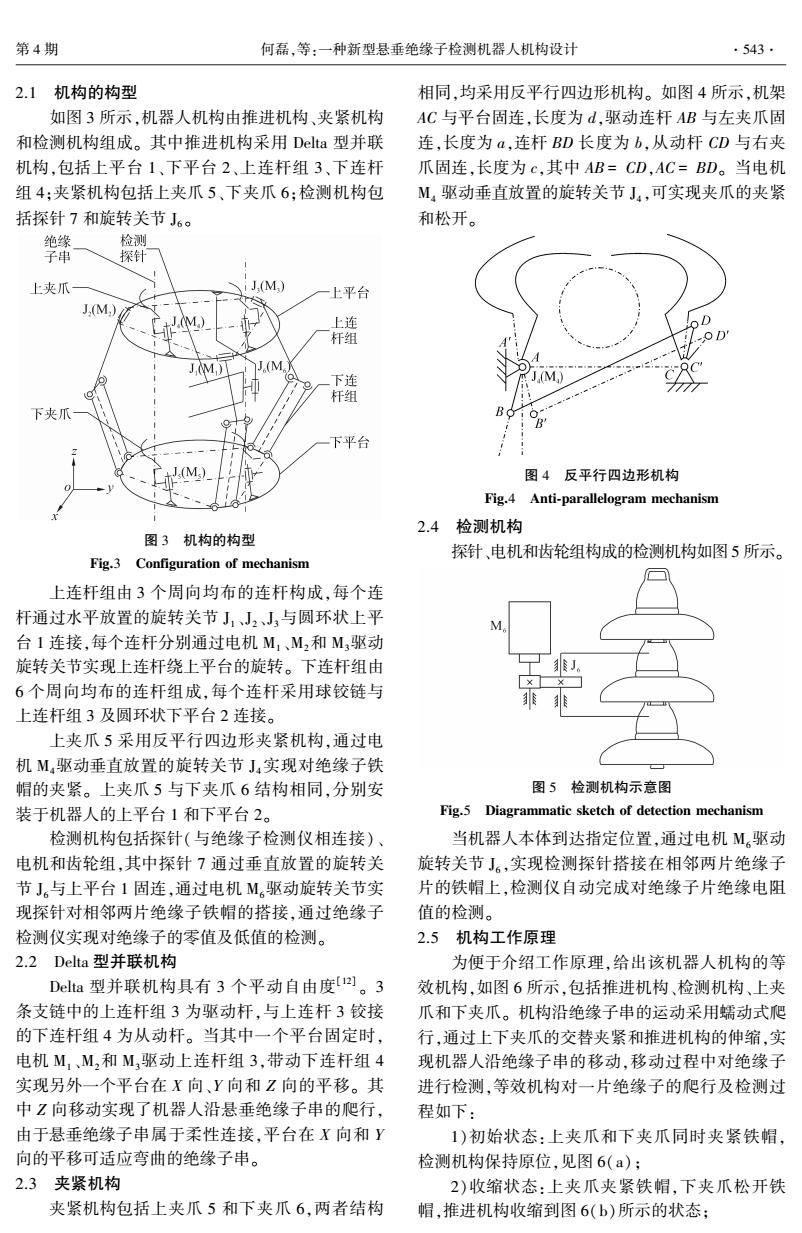
第4期 何磊,等:一种新型悬垂绝缘子检测机器人机构设计 ·543. 2.1机构的构型 相同,均采用反平行四边形机构。如图4所示,机架 如图3所示,机器人机构由推进机构、夹紧机构 AC与平台固连,长度为d,驱动连杆AB与左夹爪固 和检测机构组成。其中推进机构采用Delta型并联 连,长度为a,连杆BD长度为b,从动杆CD与右夹 机构,包括上平台1、下平台2、上连杆组3、下连杆 爪固连,长度为c,其中AB=CD,AC=BD。当电机 组4:夹紧机构包括上夹爪5、下夹爪6:检测机构包 M,驱动垂直放置的旋转关节J4,可实现夹爪的夹紧 括探针7和旋转关节J6。 和松开。 绝缘 检测 子串 探针 上夹爪 i J(M) 一上平台 J(M J(M) 上连 杆组 J(M) J(M 下连 杆组 下夹爪 -下平台 J(M) 图4反平行四边形机构 Fig.4 Anti-parallelogram mechanism 2.4 检测机构 图3机构的构型 探针、电机和齿轮组构成的检测机构如图5所示。 Fig.3 Configuration of mechanism 上连杆组由3个周向均布的连杆构成,每个连 杆通过水平放置的旋转关节J、J2、J与圆环状上平 台1连接,每个连杆分别通过电机M1、M2和M3驱动 旋转关节实现上连杆绕上平台的旋转。下连杆组由 6个周向均布的连杆组成,每个连杆采用球铰链与 上连杆组3及圆环状下平台2连接。 上夹爪5采用反平行四边形夹紧机构,通过电 机M,驱动垂直放置的旋转关节J4实现对绝缘子铁 帽的夹紧。上夹爪5与下夹爪6结构相同,分别安 图5检测机构示意图 装于机器人的上平台1和下平台2。 Fig.5 Diagrammatic sketch of detection mechanism 检测机构包括探针(与绝缘子检测仪相连接)、 当机器人本体到达指定位置,通过电机M,驱动 电机和齿轮组,其中探针7通过垂直放置的旋转关 旋转关节J6,实现检测探针搭接在相邻两片绝缘子 节J。与上平台1固连,通过电机M,驱动旋转关节实 片的铁帽上,检测仪自动完成对绝缘子片绝缘电阻 现探针对相邻两片绝缘子铁帽的搭接,通过绝缘子 值的检测。 检测仪实现对绝缘子的零值及低值的检测。 2.5机构工作原理 2.2 Delta型并联机构 为便于介绍工作原理,给出该机器人机构的等 Dela型并联机构具有3个平动自由度。3 效机构,如图6所示,包括推进机构、检测机构、上夹 条支链中的上连杆组3为驱动杆,与上连杆3铰接 爪和下夹爪。机构沿绝缘子串的运动采用蠕动式爬 的下连杆组4为从动杆。当其中一个平台固定时, 行,通过上下夹爪的交替夹紧和推进机构的伸缩,实 电机M1、M,和M,驱动上连杆组3,带动下连杆组4 现机器人沿绝缘子串的移动,移动过程中对绝缘子 实现另外一个平台在X向、Y向和Z向的平移。其 进行检测,等效机构对一片绝缘子的爬行及检测过 中Z向移动实现了机器人沿悬垂绝缘子串的爬行, 程如下: 由于悬垂绝缘子串属于柔性连接,平台在X向和Y 1)初始状态:上夹爪和下夹爪同时夹紧铁帽, 向的平移可适应弯曲的绝缘子串。 检测机构保持原位,见图6(a); 2.3夹紧机构 2)收缩状态:上夹爪夹紧铁帽,下夹爪松开铁 夹紧机构包括上夹爪5和下夹爪6,两者结构 帽,推进机构收缩到图6(b)所示的状态:2.1 机构的构型 如图 3 所示,机器人机构由推进机构、夹紧机构 和检测机构组成。 其中推进机构采用 Delta 型并联 机构,包括上平台 1、下平台 2、上连杆组 3、下连杆 组 4;夹紧机构包括上夹爪 5、下夹爪 6;检测机构包 括探针 7 和旋转关节 J6 。 图 3 机构的构型 Fig.3 Configuration of mechanism 上连杆组由 3 个周向均布的连杆构成,每个连 杆通过水平放置的旋转关节 J1 、J2 、J3与圆环状上平 台 1 连接,每个连杆分别通过电机 M1 、M2和 M3驱动 旋转关节实现上连杆绕上平台的旋转。 下连杆组由 6 个周向均布的连杆组成,每个连杆采用球铰链与 上连杆组 3 及圆环状下平台 2 连接。 上夹爪 5 采用反平行四边形夹紧机构,通过电 机 M4驱动垂直放置的旋转关节 J4实现对绝缘子铁 帽的夹紧。 上夹爪 5 与下夹爪 6 结构相同,分别安 装于机器人的上平台 1 和下平台 2。 检测机构包括探针(与绝缘子检测仪相连接)、 电机和齿轮组,其中探针 7 通过垂直放置的旋转关 节 J6与上平台 1 固连,通过电机 M6驱动旋转关节实 现探针对相邻两片绝缘子铁帽的搭接,通过绝缘子 检测仪实现对绝缘子的零值及低值的检测。 2.2 Delta 型并联机构 Delta 型并联机构具有 3 个平动自由度[12] 。 3 条支链中的上连杆组 3 为驱动杆,与上连杆 3 铰接 的下连杆组 4 为从动杆。 当其中一个平台固定时, 电机 M1 、M2和 M3驱动上连杆组 3,带动下连杆组 4 实现另外一个平台在 X 向、Y 向和 Z 向的平移。 其 中 Z 向移动实现了机器人沿悬垂绝缘子串的爬行, 由于悬垂绝缘子串属于柔性连接,平台在 X 向和 Y 向的平移可适应弯曲的绝缘子串。 2.3 夹紧机构 夹紧机构包括上夹爪 5 和下夹爪 6,两者结构 相同,均采用反平行四边形机构。 如图 4 所示,机架 AC 与平台固连,长度为 d,驱动连杆 AB 与左夹爪固 连,长度为 a,连杆 BD 长度为 b,从动杆 CD 与右夹 爪固连,长度为 c,其中 AB = CD,AC = BD。 当电机 M4 驱动垂直放置的旋转关节 J4 ,可实现夹爪的夹紧 和松开。 图 4 反平行四边形机构 Fig.4 Anti⁃parallelogram mechanism 2.4 检测机构 探针、电机和齿轮组构成的检测机构如图 5 所示。 图 5 检测机构示意图 Fig.5 Diagrammatic sketch of detection mechanism 当机器人本体到达指定位置,通过电机 M6驱动 旋转关节 J6 ,实现检测探针搭接在相邻两片绝缘子 片的铁帽上,检测仪自动完成对绝缘子片绝缘电阻 值的检测。 2.5 机构工作原理 为便于介绍工作原理,给出该机器人机构的等 效机构,如图 6 所示,包括推进机构、检测机构、上夹 爪和下夹爪。 机构沿绝缘子串的运动采用蠕动式爬 行,通过上下夹爪的交替夹紧和推进机构的伸缩,实 现机器人沿绝缘子串的移动,移动过程中对绝缘子 进行检测,等效机构对一片绝缘子的爬行及检测过 程如下: 1)初始状态:上夹爪和下夹爪同时夹紧铁帽, 检测机构保持原位,见图 6(a); 2)收缩状态:上夹爪夹紧铁帽,下夹爪松开铁 帽,推进机构收缩到图 6(b)所示的状态; 第 4 期 何磊,等:一种新型悬垂绝缘子检测机器人机构设计 ·543·