正在加载图片...
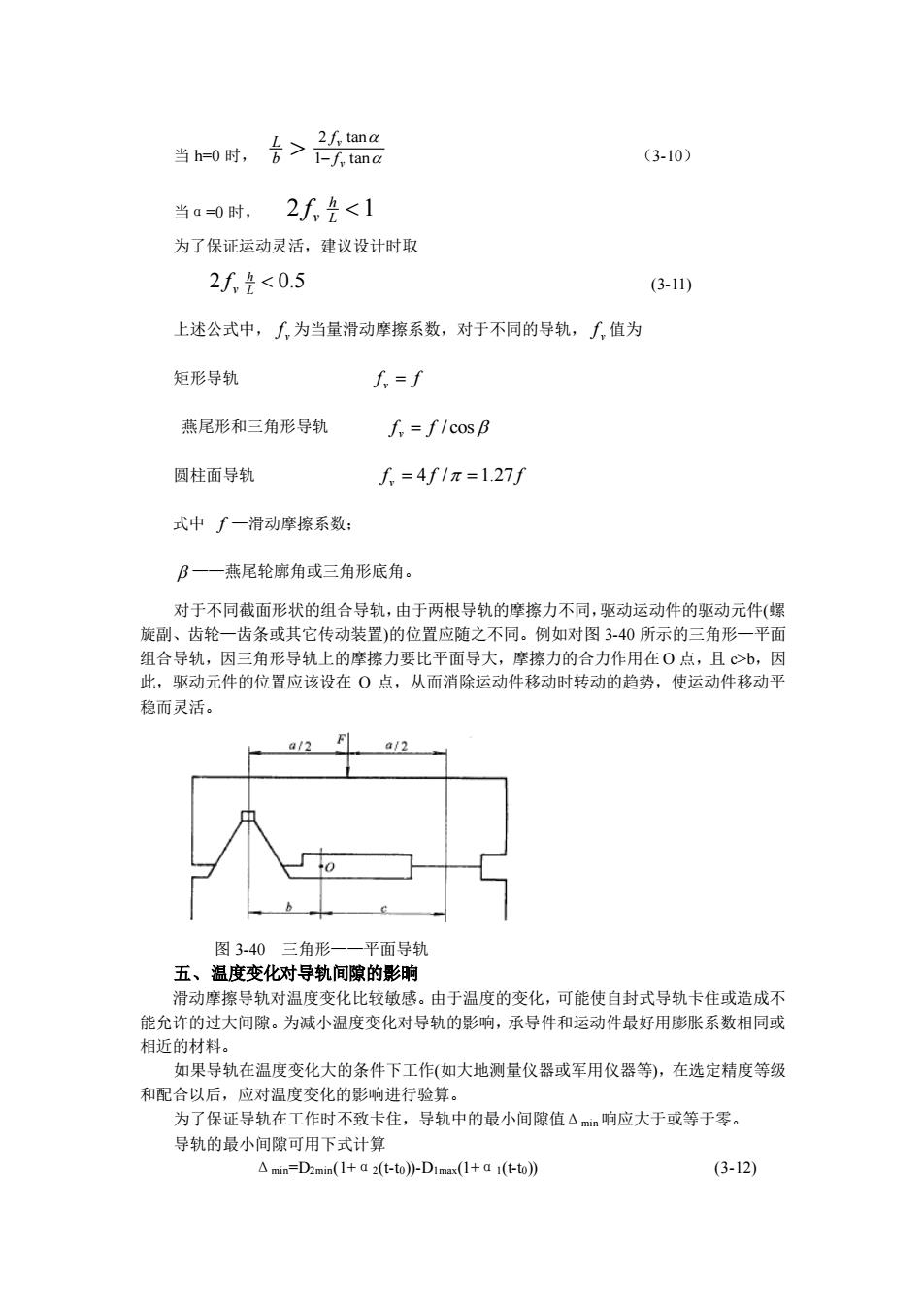
当时,专>头器 (3-10) 当a=0时, 2f色<1 为了保证运动灵活,建议设计时取 2f,4<0.5 (3-11 上述公式中,为当量滑动摩擦系数,对于不同的导轨,值为 矩形导轨 f=f 燕尾形和三角形导轨 f.=f/cos B 圆柱面导轨 f=4f1π=1.27f1 式中∫一滑动摩擦系数: B一—燕尾轮廓角或三角形底角 对于不同截面形状的组合导轨,由于两根导轨的摩擦力不同,驱动运动件的驱动元件(螺 旋副、齿轮一齿条或其它传动装置)的位置应随之不同。例如对图3-40所示的三角形一平面 组合导轨,因三角形导轨上的摩擦力要比平面导大,摩擦力的合力作用在0点,且c>b,因 此,驱动元件的位置应该设在0点,从而消除运动件移动时转动的趋势,使运动件移动平 稳而灵活。 e/2 图3.40二角形一一平面导轨 五、温度变化对导轨间隙的影响 滑动摩擦导轨对温度变化比较敏感。由于温度的变化,可能使自封式导轨卡住或造成不 能允许的过大间隙。为减小温度变化对导轨的影响,承导件和运动件最好用膨胀系数相同或 相近的材料。 如果导轨在温度变化大的条件下工作(如大地测量仪器或军用仪器等),在选定精度等级 和配合以后,应对温度变化的 进行验算 为了保证导轨在工作时不致卡住,导轨中的最小间隙值△m响应大于或等于零。 导轨的最小间限可用下式计算 △min=D2min(1+a(t-to)l-D1a(1+ai(tto)》 (3-12) 当 h=0 时, 1 tan 2 tan v v f f b L − (3-10) 当α=0 时, 2 1 L h v f 为了保证运动灵活,建议设计时取 2 0.5 L h v f (3-11) 上述公式中, v f 为当量滑动摩擦系数,对于不同的导轨, v f 值为 矩形导轨 f f v = 燕尾形和三角形导轨 f v = f / cos 圆柱面导轨 f f f v = 4 / =1.27 式中 f —滑动摩擦系数; ——燕尾轮廓角或三角形底角。 对于不同截面形状的组合导轨,由于两根导轨的摩擦力不同,驱动运动件的驱动元件(螺 旋副、齿轮—齿条或其它传动装置)的位置应随之不同。例如对图 3-40 所示的三角形—平面 组合导轨,因三角形导轨上的摩擦力要比平面导大,摩擦力的合力作用在 O 点,且 c>b,因 此,驱动元件的位置应该设在 O 点,从而消除运动件移动时转动的趋势,使运动件移动平 稳而灵活。 图 3-40 三角形——平面导轨 五、温度变化对导轨间隙的影晌 滑动摩擦导轨对温度变化比较敏感。由于温度的变化,可能使自封式导轨卡住或造成不 能允许的过大间隙。为减小温度变化对导轨的影响,承导件和运动件最好用膨胀系数相同或 相近的材料。 如果导轨在温度变化大的条件下工作(如大地测量仪器或军用仪器等),在选定精度等级 和配合以后,应对温度变化的影响进行验算。 为了保证导轨在工作时不致卡住,导轨中的最小间隙值Δmin 响应大于或等于零。 导轨的最小间隙可用下式计算 Δmin=D2min(1+α2(t-t0))-D1max(1+α1(t-t0)) (3-12)