正在加载图片...
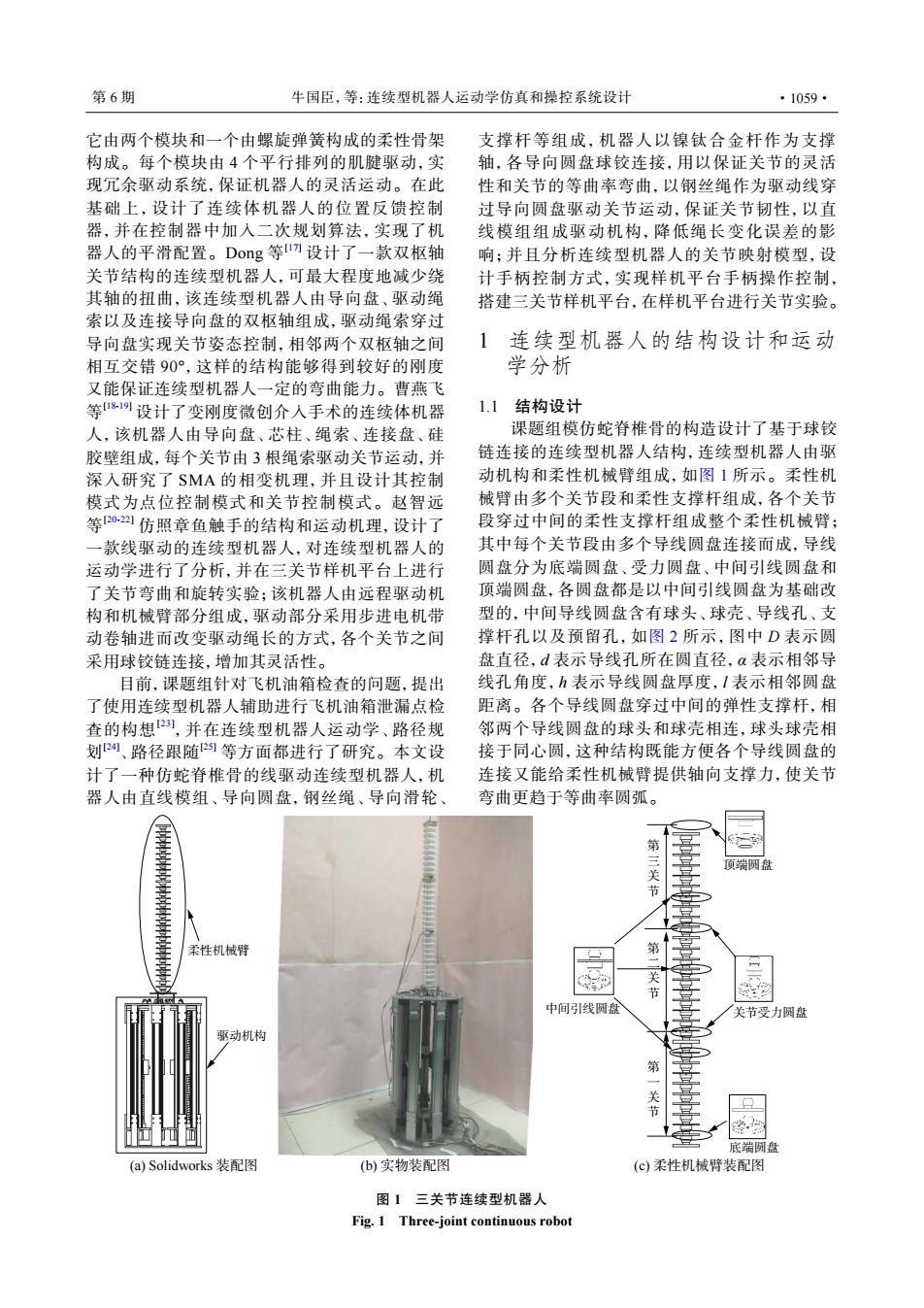
第6期 牛国臣,等:连续型机器人运动学仿真和操控系统设计 ·1059· 它由两个模块和一个由螺旋弹簧构成的柔性骨架 支撑杆等组成,机器人以镍钛合金杆作为支撑 构成。每个模块由4个平行排列的肌腱驱动,实 轴,各导向圆盘球铰连接,用以保证关节的灵活 现冗余驱动系统,保证机器人的灵活运动。在此 性和关节的等曲率弯曲,以钢丝绳作为驱动线穿 基础上,设计了连续体机器人的位置反馈控制 过导向圆盘驱动关节运动,保证关节韧性,以直 器,并在控制器中加入二次规划算法,实现了机 线模组组成驱动机构,降低绳长变化误差的影 器人的平滑配置。Dong等叨设计了一款双枢轴 响;并且分析连续型机器人的关节映射模型,设 关节结构的连续型机器人,可最大程度地减少绕 计手柄控制方式,实现样机平台手柄操作控制, 其轴的扭曲,该连续型机器人由导向盘、驱动绳 搭建三关节样机平台,在样机平台进行关节实验。 索以及连接导向盘的双枢轴组成,驱动绳索穿过 导向盘实现关节姿态控制,相邻两个双枢轴之间 1连续型机器人的结构设计和运动 相互交错90°,这样的结构能够得到较好的刚度 学分析 又能保证连续型机器人一定的弯曲能力。曹燕飞 等&设计了变刚度微创介入手术的连续体机器 1.1结构设计 人,该机器人由导向盘、芯柱、绳索、连接盘、硅 课题组模仿蛇脊椎骨的构造设计了基于球铰 胶壁组成,每个关节由3根绳索驱动关节运动,并 链连接的连续型机器人结构,连续型机器人由驱 深入研究了SMA的相变机理,并且设计其控制 动机构和柔性机械臂组成,如图1所示。柔性机 模式为点位控制模式和关节控制模式。赵智远 械臂由多个关节段和柔性支撑杆组成,各个关节 等202四仿照章鱼触手的结构和运动机理,设计了 段穿过中间的柔性支撑杆组成整个柔性机械臂: ~款线驱动的连续型机器人,对连续型机器人的 其中每个关节段由多个导线圆盘连接而成,导线 运动学进行了分析,并在三关节样机平台上进行 圆盘分为底端圆盘、受力圆盘、中间引线圆盘和 了关节弯曲和旋转实验;该机器人由远程驱动机 顶端圆盘,各圆盘都是以中间引线圆盘为基础改 构和机械臂部分组成,驱动部分采用步进电机带 型的,中间导线圆盘含有球头、球壳、导线孔、支 动卷轴进而改变驱动绳长的方式,各个关节之间 撑杆孔以及预留孔,如图2所示,图中D表示圆 采用球铰链连接,增加其灵活性。 盘直径,d表示导线孔所在圆直径,α表示相邻导 目前,课题组针对飞机油箱检查的问题,提出 线孔角度,h表示导线圆盘厚度,I表示相邻圆盘 了使用连续型机器人辅助进行飞机油箱泄漏点检 距离。各个导线圆盘穿过中间的弹性支撑杆,相 查的构想2),并在连续型机器人运动学、路径规 邻两个导线圆盘的球头和球壳相连,球头球壳相 划2、路径跟随2等方面都进行了研究。本文设 接于同心圆,这种结构既能方便各个导线圆盘的 计了一种仿蛇脊椎骨的线驱动连续型机器人,机 连接又能给柔性机械臂提供轴向支撑力,使关节 器人由直线模组、导向圆盘,钢丝绳、导向滑轮、 弯曲更趋于等曲率圆弧。 关 顶端圆盘 节 柔性机械臂 第 中间引线圆盘 关节受力圆盘 驱动机构 第 关 节 底端圆盘 (a)Solidworks装配图 (b)实物装配图 (C)柔性机械臂装配图 图1三关节连续型机器人 Fig.1 Three-joint continuous robot它由两个模块和一个由螺旋弹簧构成的柔性骨架 构成。每个模块由 4 个平行排列的肌腱驱动,实 现冗余驱动系统,保证机器人的灵活运动。在此 基础上,设计了连续体机器人的位置反馈控制 器,并在控制器中加入二次规划算法,实现了机 器人的平滑配置。Dong 等 [17] 设计了一款双枢轴 关节结构的连续型机器人,可最大程度地减少绕 其轴的扭曲,该连续型机器人由导向盘、驱动绳 索以及连接导向盘的双枢轴组成,驱动绳索穿过 导向盘实现关节姿态控制,相邻两个双枢轴之间 相互交错 90°,这样的结构能够得到较好的刚度 又能保证连续型机器人一定的弯曲能力。曹燕飞 等 [18-19] 设计了变刚度微创介入手术的连续体机器 人,该机器人由导向盘、芯柱、绳索、连接盘、硅 胶壁组成,每个关节由 3 根绳索驱动关节运动,并 深入研究了 SMA 的相变机理,并且设计其控制 模式为点位控制模式和关节控制模式。赵智远 等 [20-22] 仿照章鱼触手的结构和运动机理,设计了 一款线驱动的连续型机器人,对连续型机器人的 运动学进行了分析,并在三关节样机平台上进行 了关节弯曲和旋转实验;该机器人由远程驱动机 构和机械臂部分组成,驱动部分采用步进电机带 动卷轴进而改变驱动绳长的方式,各个关节之间 采用球铰链连接,增加其灵活性。 目前,课题组针对飞机油箱检查的问题,提出 了使用连续型机器人辅助进行飞机油箱泄漏点检 查的构想[23] ,并在连续型机器人运动学、路径规 划 [24] 、路径跟随[25] 等方面都进行了研究。本文设 计了一种仿蛇脊椎骨的线驱动连续型机器人,机 器人由直线模组、导向圆盘,钢丝绳、导向滑轮、 支撑杆等组成,机器人以镍钛合金杆作为支撑 轴,各导向圆盘球铰连接,用以保证关节的灵活 性和关节的等曲率弯曲,以钢丝绳作为驱动线穿 过导向圆盘驱动关节运动,保证关节韧性,以直 线模组组成驱动机构,降低绳长变化误差的影 响;并且分析连续型机器人的关节映射模型,设 计手柄控制方式,实现样机平台手柄操作控制, 搭建三关节样机平台,在样机平台进行关节实验。 1 连续型机器人的结构设计和运动 学分析 1.1 结构设计 课题组模仿蛇脊椎骨的构造设计了基于球铰 链连接的连续型机器人结构,连续型机器人由驱 动机构和柔性机械臂组成,如图 1 所示。柔性机 械臂由多个关节段和柔性支撑杆组成,各个关节 段穿过中间的柔性支撑杆组成整个柔性机械臂; 其中每个关节段由多个导线圆盘连接而成,导线 圆盘分为底端圆盘、受力圆盘、中间引线圆盘和 顶端圆盘,各圆盘都是以中间引线圆盘为基础改 型的,中间导线圆盘含有球头、球壳、导线孔、支 撑杆孔以及预留孔,如图 2 所示,图中 D 表示圆 盘直径,d 表示导线孔所在圆直径,α 表示相邻导 线孔角度,h 表示导线圆盘厚度,l 表示相邻圆盘 距离。各个导线圆盘穿过中间的弹性支撑杆,相 邻两个导线圆盘的球头和球壳相连,球头球壳相 接于同心圆,这种结构既能方便各个导线圆盘的 连接又能给柔性机械臂提供轴向支撑力,使关节 弯曲更趋于等曲率圆弧。 柔性机械臂 驱动机构 (a) Solidworks 装配图 (b) 实物装配图 底端圆盘 中间引线圆盘 关节受力圆盘 顶端圆盘 第 二 关 节 第 三 关 节 第 一 关 节 (c) 柔性机械臂装配图 图 1 三关节连续型机器人 Fig. 1 Three-joint continuous robot 第 6 期 牛国臣,等:连续型机器人运动学仿真和操控系统设计 ·1059·