正在加载图片...
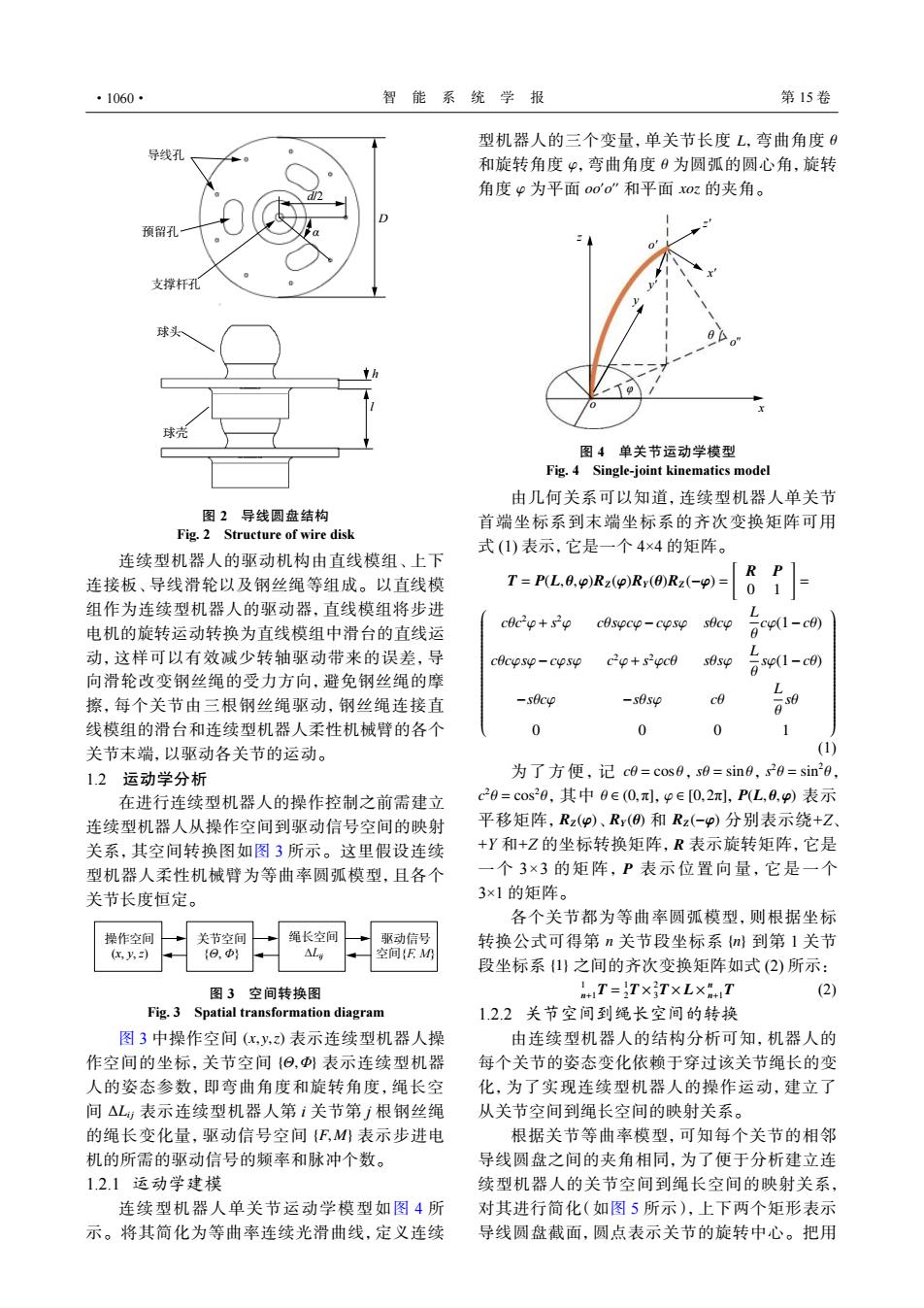
·1060· 智能系统学报 第15卷 型机器人的三个变量,单关节长度L,弯曲角度日 导线孔 和旋转角度9,弯曲角度0为圆弧的圆心角,旋转 角度p为平面ooo”和平面x0z的夹角。 预留孔 支撑杆孔 图4单关节运动学模型 Fig.4 Single-joint kinematics model 由几何关系可以知道,连续型机器人单关节 图2导线圆盘结构 首端坐标系到末端坐标系的齐次变换矩阵可用 Fig.2 Structure of wire disk 式(1)表示,它是一个4×4的矩阵。 连续型机器人的驱动机构由直线模组、上下 R 连接板、导线滑轮以及钢丝绳等组成。以直线模 T=P(L.0.p)Rz(p)Rr(0)Rz(-p)= 组作为连续型机器人的驱动器,直线模组将步进 cOc-+s 电机的旋转运动转换为直线模组中滑台的直线运 cosuc-csp sBcw g(1-c0) 动,这样可以有效减少转轴驱动带来的误差,导 L cOcs-csp c2+s"vce seso s(1-c0) 向滑轮改变钢丝绳的受力方向,避免钢丝绳的摩 擦,每个关节由三根钢丝绳驱动,钢丝绳连接直 -s0cip -s0s9 co L 线模组的滑台和连续型机器人柔性机械臂的各个 0 0 0 1 关节末端,以驱动各关节的运动。 (1) 1.2运动学分析 为了方便,记c0=cos0,s0=sin0,s20=sin20 在进行连续型机器人的操作控制之前需建立 c20=cos20,其中0∈(0,,9∈[0,2,P(L,0,p)表示 连续型机器人从操作空间到驱动信号空间的映射 平移矩阵,Rz(p)、Rv(O和Rz(-P)分别表示绕+Z、 关系,其空间转换图如图3所示。这里假设连续 +Y和+Z的坐标转换矩阵,R表示旋转矩阵,它是 型机器人柔性机械臂为等曲率圆弧模型,且各个 一个3×3的矩阵,P表示位置向量,它是一个 关节长度恒定。 3×1的矩阵。 各个关节都为等曲率圆弧模型,则根据坐标 操作空间 关节空间 绳长空间 驱动信号 转换公式可得第n关节段坐标系{m到第1关节 (化,y,) {⊙, ALy 空间{FM 段坐标系1)之间的齐次变换矩阵如式(2)所示: 图3空间转换图 +T=T×T×L×+T (2) Fig.3 Spatial transformation diagram 1.2.2关节空间到绳长空间的转换 图3中操作空间(x,yz)表示连续型机器人操 由连续型机器人的结构分析可知,机器人的 作空间的坐标,关节空间{⊙,表示连续型机器 每个关节的姿态变化依赖于穿过该关节绳长的变 人的姿态参数,即弯曲角度和旋转角度,绳长空 化,为了实现连续型机器人的操作运动,建立了 间△L表示连续型机器人第i关节第j根钢丝绳 从关节空间到绳长空间的映射关系。 的绳长变化量,驱动信号空间{F,M表示步进电 根据关节等曲率模型,可知每个关节的相邻 机的所需的驱动信号的频率和脉冲个数。 导线圆盘之间的夹角相同,为了便于分析建立连 1.2.1运动学建模 续型机器人的关节空间到绳长空间的映射关系, 连续型机器人单关节运动学模型如图4所 对其进行简化(如图5所示),上下两个矩形表示 示。将其简化为等曲率连续光滑曲线,定义连续 导线圆盘截面,圆点表示关节的旋转中心。把用D 导线孔 预留孔 支撑杆孔 α d/2 l h 球壳 球头 图 2 导线圆盘结构 Fig. 2 Structure of wire disk 连续型机器人的驱动机构由直线模组、上下 连接板、导线滑轮以及钢丝绳等组成。以直线模 组作为连续型机器人的驱动器,直线模组将步进 电机的旋转运动转换为直线模组中滑台的直线运 动,这样可以有效减少转轴驱动带来的误差,导 向滑轮改变钢丝绳的受力方向,避免钢丝绳的摩 擦,每个关节由三根钢丝绳驱动,钢丝绳连接直 线模组的滑台和连续型机器人柔性机械臂的各个 关节末端,以驱动各关节的运动。 1.2 运动学分析 在进行连续型机器人的操作控制之前需建立 连续型机器人从操作空间到驱动信号空间的映射 关系,其空间转换图如图 3 所示。这里假设连续 型机器人柔性机械臂为等曲率圆弧模型,且各个 关节长度恒定。 操作空间 (x, y, z) 关节空间 {Θ, Φ} 绳长空间 ∆Lij 驱动信号 空间{F, M} 图 3 空间转换图 Fig. 3 Spatial transformation diagram (x, y,z) {Θ,Φ} ∆Li j {F, M} 图 3 中操作空间 表示连续型机器人操 作空间的坐标,关节空间 表示连续型机器 人的姿态参数,即弯曲角度和旋转角度,绳长空 间 表示连续型机器人第 i 关节第 j 根钢丝绳 的绳长变化量,驱动信号空间 表示步进电 机的所需的驱动信号的频率和脉冲个数。 1.2.1 运动学建模 连续型机器人单关节运动学模型如图 4 所 示。将其简化为等曲率连续光滑曲线,定义连续 L θ φ θ φ oo′o ′′ xoz 型机器人的三个变量,单关节长度 ,弯曲角度 和旋转角度 ,弯曲角度 为圆弧的圆心角,旋转 角度 为平面 和平面 的夹角。 z o o″ o′ x x′ z′ y′ y φ θ 图 4 单关节运动学模型 Fig. 4 Single-joint kinematics model 由几何关系可以知道,连续型机器人单关节 首端坐标系到末端坐标系的齐次变换矩阵可用 式 (1) 表示,它是一个 4×4 的矩阵。 T = P(L,θ,φ)RZ(φ)RY(θ)RZ(−φ) = [ R P 0 1 ] = cθc 2φ+ s 2φ cθsφcφ−cφsφ sθcφ L θ cφ(1−cθ) cθcφsφ−cφsφ c 2φ+ s 2φcθ sθsφ L θ sφ(1−cθ) −sθcφ −sθsφ cθ L θ sθ 0 0 0 1 (1) cθ = cos θ sθ = sinθ s 2 θ = sin2 θ c 2 θ = cos2 θ θ ∈ (0,π] φ ∈ [0,2π] P(L,θ,φ) RZ(φ) RY(θ) RZ(−φ) R P 为了方便,记 , , , ,其中 , , 表示 平移矩阵, 、 和 分别表示绕+Z、 +Y 和+Z 的坐标转换矩阵, 表示旋转矩阵,它是 一个 3×3 的矩阵, 表示位置向量,它是一个 3×1 的矩阵。 n {n} {1} 各个关节都为等曲率圆弧模型,则根据坐标 转换公式可得第 关节段坐标系 到第 1 关节 段坐标系 之间的齐次变换矩阵如式 (2) 所示: 1 n+1T = 1 2T × 2 3T × L× n n+1T (2) 1.2.2 关节空间到绳长空间的转换 由连续型机器人的结构分析可知,机器人的 每个关节的姿态变化依赖于穿过该关节绳长的变 化,为了实现连续型机器人的操作运动,建立了 从关节空间到绳长空间的映射关系。 根据关节等曲率模型,可知每个关节的相邻 导线圆盘之间的夹角相同,为了便于分析建立连 续型机器人的关节空间到绳长空间的映射关系, 对其进行简化(如图 5 所示),上下两个矩形表示 导线圆盘截面,圆点表示关节的旋转中心。把用 ·1060· 智 能 系 统 学 报 第 15 卷