正在加载图片...
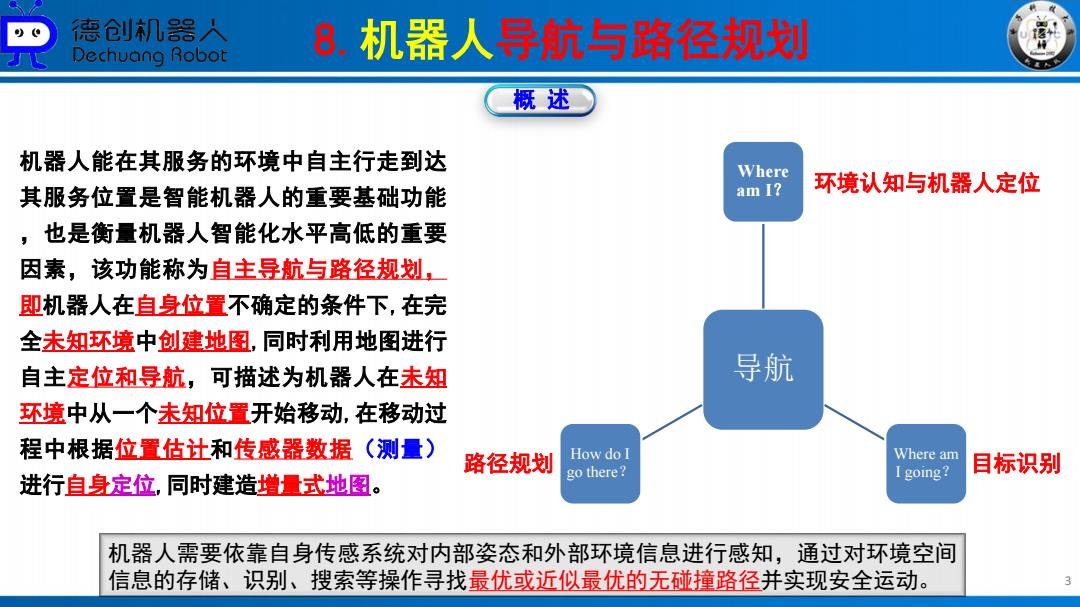
德仓创机器人 Dechuang Robot 8.机器人导航与路径规划 概述 机器人能在其服务的环境中自主行走到达 Where am I? 环境认知与机器人定位 其服务位置是智能机器人的重要基础功能 ,也是衡量机器人智能化水平高低的重要 因素,该功能称为自主导航与路径规划, 即机器人在自身位置不确定的条件下,在完 全未知环境中创建地图,同时利用地图进行 自主定位和导航,可描述为机器人在未知 导航 环境中从一个未知位置开始移动,在移动过 程中根据位置估计和传感器数据(测量) 路径规划 How do I Where am go there? I going? 目标识别 进行自身定位,同时建造增量式地图。 机器人需要依靠自身传感系统对内部姿态和外部环境信息进行感知,通过对环境空间 信息的存储、识别、搜索等操作寻找最优或近似最优的无碰撞路径并实现安全运动。8.机器人导航与路径规划 3 机器人能在其服务的环境中自主行走到达 其服务位置是智能机器人的重要基础功能 ,也是衡量机器人智能化水平高低的重要 因素,该功能称为自主导航与路径规划, 即机器人在自身位置不确定的条件下,在完 全未知环境中创建地图,同时利用地图进行 自主定位和导航,可描述为机器人在未知 环境中从一个未知位置开始移动,在移动过 程中根据位置估计和传感器数据(测量) 进行自身定位,同时建造增量式地图。 导航 Where am I? Where am I going? How do I go there? 环境认知与机器人定位 路径规划 目标识别 机器人需要依靠自身传感系统对内部姿态和外部环境信息进行感知,通过对环境空间 信息的存储、识别、搜索等操作寻找最优或近似最优的无碰撞路径并实现安全运动。 概 述