正在加载图片...
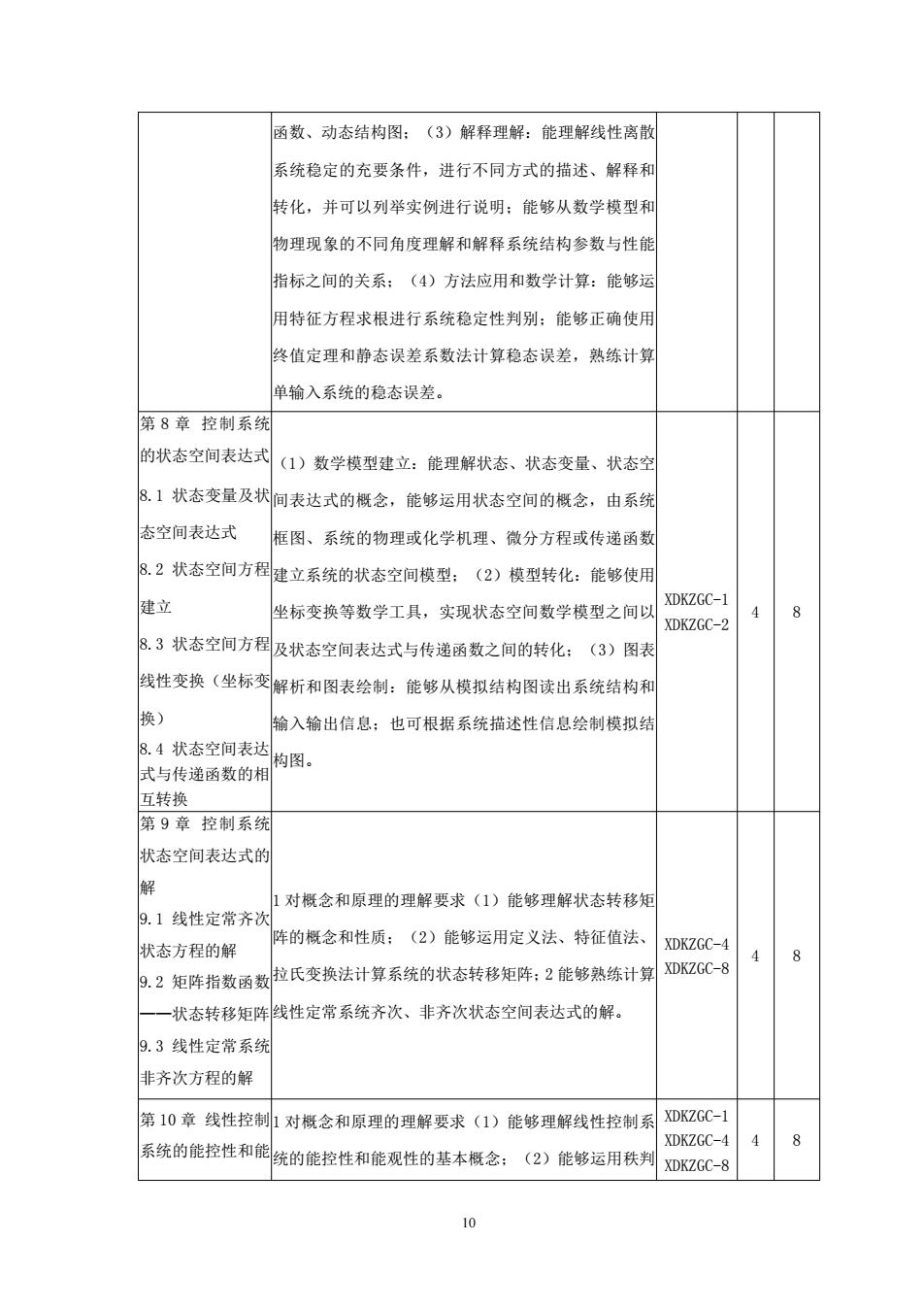
函数、动态结构图:(3)解释理解:能理解线性离散 系统稳定的充要条件,进行不同方式的描述、解释利 转化,并可以列举实例进行说明:能够从数学模型和 物理现象的不同角度理解和解释系统结构参数与性能 指标之间的关系;(4)方法应用和数学计算:能够运 用特征方程求根进行系统稳定性判别:能够正确使用 终值定理和静态误差系数法计算稳态误差,熟练计算 单输入系统的稳态误差 第8章控制系统 的状态空间表达式 (1)数学模型建立:能理解状态、状态变量、状态空 8.1状态变量及 间表达式的概念,能够运用状态空间的概念,由系统 态空间表达式 框图、系统的物理或化学机理、微分方程或传递函数 B2状态空间方程健立系统的状态空间模型:(2)模型转化:能够使用 建立 XDKZGC-1 坐标变换等数学工具,实现状态空间数学模型之间以 4 8 XDKZGC-2 .3状态空间方程及状态空间表达式与传递函数之间的转化:(3)图表 伐性变换(坐标变解析和图表绘制:能够从模拟结构图读出系统结构和 换) 输入输出信总:也可根据系统描述性信息绘制模拟结 8.4状态空间表达 图。 式与传递函数的相 互转换 第9章控制系名 状态空间表达式的 解 对概念和原理的理解要求(1)能够理解状态转移矩 9.1线性定常齐次 状态方程的解 年的概念和性质:(2)能够运用定义法、特征值法 XDKZGC-4 8 9.2矩库指数函数拉氏变换法计算系统的状态转移矩阵:2能够熟练计算 XDKZGC-8 一—状态转移矩阵线性定常系统齐次、非齐次状态空间表达式的解, 9.3线性定常系线 非齐次方程的解 第10章线性控制1对概念和原理的理解要求(1)能够理解线性控制系XDK?CC-1 系统的能控性和能铁的能控性和能观性的基本概念:(2)能够运用秩判XDKZGC--8 XDKZGC-4 8 1010 函数、动态结构图;(3)解释理解:能理解线性离散 系统稳定的充要条件,进行不同方式的描述、解释和 转化,并可以列举实例进行说明;能够从数学模型和 物理现象的不同角度理解和解释系统结构参数与性能 指标之间的关系;(4)方法应用和数学计算:能够运 用特征方程求根进行系统稳定性判别;能够正确使用 终值定理和静态误差系数法计算稳态误差,熟练计算 单输入系统的稳态误差。 第 8 章 控制系统 的状态空间表达式 8.1 状态变量及状 态空间表达式 8.2 状态空间方程 建立 8.3 状态空间方程 线性变换(坐标变 换) 8.4 状态空间表达 式与传递函数的相 互转换 (1)数学模型建立:能理解状态、状态变量、状态空 间表达式的概念,能够运用状态空间的概念,由系统 框图、系统的物理或化学机理、微分方程或传递函数 建立系统的状态空间模型;(2)模型转化:能够使用 坐标变换等数学工具,实现状态空间数学模型之间以 及状态空间表达式与传递函数之间的转化;(3)图表 解析和图表绘制:能够从模拟结构图读出系统结构和 输入输出信息;也可根据系统描述性信息绘制模拟结 构图。 XDKZGC-1 XDKZGC-2 4 8 第 9 章 控制系统 状态空间表达式的 解 9.1 线性定常齐次 状态方程的解 9.2 矩阵指数函数 ——状态转移矩阵 9.3 线性定常系统 非齐次方程的解 1 对概念和原理的理解要求(1)能够理解状态转移矩 阵的概念和性质;(2)能够运用定义法、特征值法、 拉氏变换法计算系统的状态转移矩阵;2 能够熟练计算 线性定常系统齐次、非齐次状态空间表达式的解。 XDKZGC-4 XDKZGC-8 4 8 第 10 章 线性控制 系统的能控性和能 1 对概念和原理的理解要求(1)能够理解线性控制系 统的能控性和能观性的基本概念;(2)能够运用秩判 XDKZGC-1 XDKZGC-4 XDKZGC-8 4 8