正在加载图片...
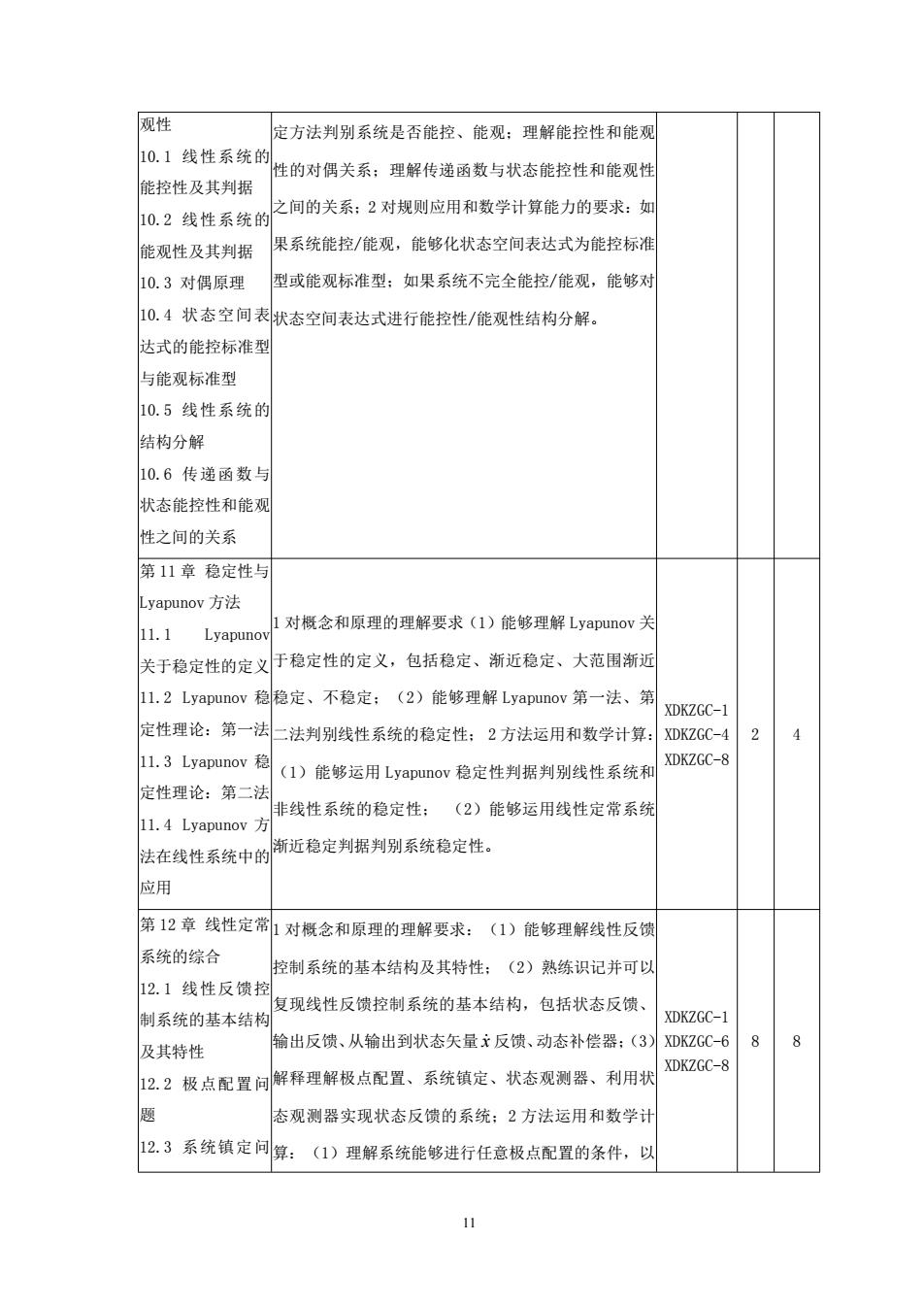
观性 定方法判别系统是否能控、能观:理解能控性和能观 10.1线性系统的 性的对偶关系;理解传递函数与状态能控性和能观性 能控性及其判据 10.2线性系统 之间的关系:2对规则应用和数学计算能力的要求:如 能观性及其判据 果系统能控/能观,能够化状态空间表达式为能控标准 10.3对偶原理 型或能观标准型:如果系统不完全能控/能观,能够对 10.4状态空间表状态空间表达式进行能控性/能观性结构分解 达式的能控标准型 与能观标准型 10.5线性系统的 结构分解 10.6传递函数与 状态能控性和能观 性之间的关系 第11章稳定性 Lyapunov方法 11.1 Lyapuno 对概念和原理的理解要求(1)能够理解Lyapunov关 关于稳定性的定义 于稳定性的定义,包括稳定、渐近稳定、大范围渐近 1l.2 Lyapunov稳稳定、不稳定:(2)能够理解Lyapunov第一法、第 XDKZGC-1 定性理论:第一法 二法判别线性系统的稳定性:2方法运用和数学计算:XDKZGC--42 4 1.3 Lyapunov稳 XDKZGC-8 (1)能够运用Lyapunov稳定性判据判别线性系统和 定性理论:第二法 非线性系统的稳定性:(2)能够运用线性定常系统 1L.4 Lyapunov方 法在线性系统中的 渐近稳定判据判别系统稳定性。 应用 第12章线性定常对概念和原理的理解要求:(1)能够理解线性反例 系统的综合 控制系统的基本结构及其特性:(2)熟练识记并可以 12.1线性反馈料 制系统的基本结构 复现线性反馈控制系统的基本结构,包括状态反馈 XDKZGC-1 及其特性 输出反绩、从输出到状态矢量文反馈、动态补偿器:(3)XDKZGC--68 8 XDKZGC-8 12.2极点配置 解释理解极点配置、系统镇定、状态观测器、利用状 态观测器实现状态反馈的系统:2方法运用和数学计 12.3系统镇定问 算:(1)理解系统能够进行任意极点配置的条件,以 11 11 观性 10.1 线性系统的 能控性及其判据 10.2 线性系统的 能观性及其判据 10.3 对偶原理 10.4 状态空间表 达式的能控标准型 与能观标准型 10.5 线性系统的 结构分解 10.6 传递函数与 状态能控性和能观 性之间的关系 定方法判别系统是否能控、能观;理解能控性和能观 性的对偶关系;理解传递函数与状态能控性和能观性 之间的关系;2 对规则应用和数学计算能力的要求:如 果系统能控/能观,能够化状态空间表达式为能控标准 型或能观标准型;如果系统不完全能控/能观,能够对 状态空间表达式进行能控性/能观性结构分解。 第 11 章 稳定性与 Lyapunov 方法 11.1 Lyapunov 关于稳定性的定义 11.2 Lyapunov 稳 定性理论:第一法 11.3 Lyapunov 稳 定性理论:第二法 11.4 Lyapunov 方 法在线性系统中的 应用 1 对概念和原理的理解要求(1)能够理解 Lyapunov 关 于稳定性的定义,包括稳定、渐近稳定、大范围渐近 稳定、不稳定;(2)能够理解 Lyapunov 第一法、第 二法判别线性系统的稳定性; 2 方法运用和数学计算: (1)能够运用 Lyapunov 稳定性判据判别线性系统和 非线性系统的稳定性; (2)能够运用线性定常系统 渐近稳定判据判别系统稳定性。 XDKZGC-1 XDKZGC-4 XDKZGC-8 2 4 第 12 章 线性定常 系统的综合 12.1 线性反馈控 制系统的基本结构 及其特性 12.2 极点配置问 题 12.3 系统镇定问 1 对概念和原理的理解要求:(1)能够理解线性反馈 控制系统的基本结构及其特性;(2)熟练识记并可以 复现线性反馈控制系统的基本结构,包括状态反馈、 输出反馈、从输出到状态矢量 x 反馈、动态补偿器;(3) 解释理解极点配置、系统镇定、状态观测器、利用状 态观测器实现状态反馈的系统;2 方法运用和数学计 算:(1)理解系统能够进行任意极点配置的条件,以 XDKZGC-1 XDKZGC-6 XDKZGC-8 8 8