正在加载图片...
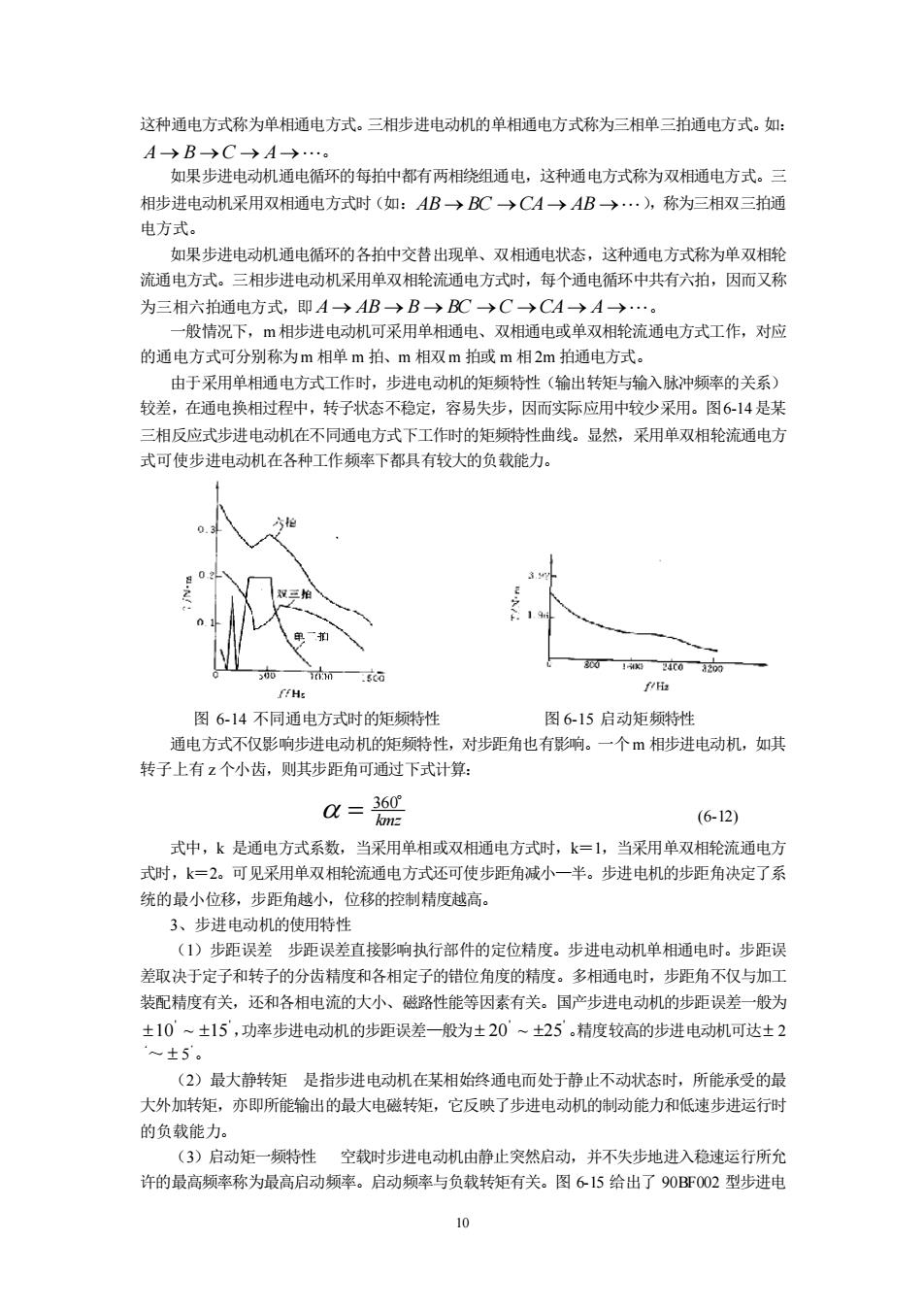
这种通电方式称为单相通电方式。三相步进电动机的单相通电方式称为三相单三拍通电方式。如: A→B→C→A3 如果步进电动机通电循环的每拍中都有两相绕组通电,这种通电方式称为双相通电方式。三 相步讲电动机果用双相通申方式时(如:AB)B口CAAB..·),称为三相双三拍证 电方式。 如果步进电动机通电循环的各拍中交替出现单、双相通电状态,这种通电方式称为单双相轮 流通电方式。三相步进电动机采用单双相轮流通电方式时,每个通电循环中共有六拍,因而又称 为三相六拍通电方式,即A→AB→B→BC →C →CA→A→…。 一般情况下,m相步进电动机可采用单相通电、双相通电或单双相轮流通电方式工作,对应 的通电方式可分别称为m相单m拍、m相双m拍或m相2m拍通电方式。 由于采用单相通电方式工作时,步进电动机的矩频特性(输出转矩与输入脉冲频率的关系) 较差,在通电换相过程中,转子状态不稳定,容易失步,因而实际应用中较少采用。图6-14是某 三相反应式步进电动机在不同通电方式下工作时的矩频特性曲线。显然,采用单双相轮流通电方 式可使步进电动机在各种工作频率下都具有较大的负载能力。 图6-14不同通电方式时的矩频特性 图6-15启动矩频特性 通电方式不仅影响步进电动机的矩频特性,对步距角也有影响。一个m相步进电动机,如其 转子上有z个小齿,则其步距角可通过下式计算: a (6-12) 式中,k是通电方式系数,当采用单相或双相通电方式时,k=1,当采用单双相轮流通电方 式时,k=2。可见采用单双相轮流通电方式还可使步距角减小一半。步进电机的步距角决定了系 统的最小位移,步距角越小,位移的控制精度越高。 3、步进电动机的使用特性 (1)步距误差 步距误差直接影响执行部件的定位精度。步进电动机单相通电时。步距误 差取决于定子和转子的分齿精度和各相定子的错位角度的精度。多相通电时,步距角不仅与加工 装配精度有关,还和各相电流的大小、磁路性能等因素有关。国产步进电动机的步距误差一般为 ±10~±15,功率步进电动机的步距误差一般为±20'~±25,精度较高的步进电动机可达±2 -±5。 (2)最大静转矩是指步讲申动机在其相始终通申而处于静止不动状态时,所能承受的最 大外加转矩,亦即所能输出的最大电磁转矩,它反映了步进电动机的制动能力和低速步进运行时 的负载能力。 (3)启动矩频特性空载时步讲申动机由静止突然启动,并不失步地讲入稳速运行所外 许的最高频率称为最高启动频率。启动频率与负载转矩有关。图615给出了90F002型步进 610 这种通电方式称为单相通电方式。三相步进电动机的单相通电方式称为三相单三拍通电方式。如: A→ B →C → A→。 如果步进电动机通电循环的每拍中都有两相绕组通电,这种通电方式称为双相通电方式。三 相步进电动机采用双相通电方式时(如: AB → BC →CA→ AB → ),称为三相双三拍通 电方式。 如果步进电动机通电循环的各拍中交替出现单、双相通电状态,这种通电方式称为单双相轮 流通电方式。三相步进电动机采用单双相轮流通电方式时,每个通电循环中共有六拍,因而又称 为三相六拍通电方式,即 A→ AB → B → BC →C →CA→ A→。 一般情况下,m相步进电动机可采用单相通电、双相通电或单双相轮流通电方式工作,对应 的通电方式可分别称为m 相单 m 拍、m 相双m 拍或 m 相2m 拍通电方式。 由于采用单相通电方式工作时,步进电动机的矩频特性(输出转矩与输入脉冲频率的关系) 较差,在通电换相过程中,转子状态不稳定,容易失步,因而实际应用中较少采用。图6-14是某 三相反应式步进电动机在不同通电方式下工作时的矩频特性曲线。显然,采用单双相轮流通电方 式可使步进电动机在各种工作频率下都具有较大的负载能力。 图 6-14 不同通电方式时的矩频特性 图 6-15 启动矩频特性 通电方式不仅影响步进电动机的矩频特性,对步距角也有影响。一个m 相步进电动机,如其 转子上有 z 个小齿,则其步距角可通过下式计算: kmz 360 = (6-12) 式中,k 是通电方式系数,当采用单相或双相通电方式时,k=1,当采用单双相轮流通电方 式时,k=2。可见采用单双相轮流通电方式还可使步距角减小—半。步进电机的步距角决定了系 统的最小位移,步距角越小,位移的控制精度越高。 3、步进电动机的使用特性 (1)步距误差 步距误差直接影响执行部件的定位精度。步进电动机单相通电时。步距误 差取决于定子和转子的分齿精度和各相定子的错位角度的精度。多相通电时,步距角不仅与加工 装配精度有关,还和各相电流的大小、磁路性能等因素有关。国产步进电动机的步距误差一般为 ' ' 10 ~ 15 ,功率步进电动机的步距误差—般为 ' ' 20 ~ 25 。精度较高的步进电动机可达 2 ‘~ 5 ’。 (2)最大静转矩 是指步进电动机在某相始终通电而处于静止不动状态时,所能承受的最 大外加转矩,亦即所能输出的最大电磁转矩,它反映了步进电动机的制动能力和低速步进运行时 的负载能力。 (3)启动矩一频特性 空载时步进电动机由静止突然启动,并不失步地进入稳速运行所允 许的最高频率称为最高启动频率。启动频率与负载转矩有关。图 6-15 给出了 90BF002 型步进电