正在加载图片...
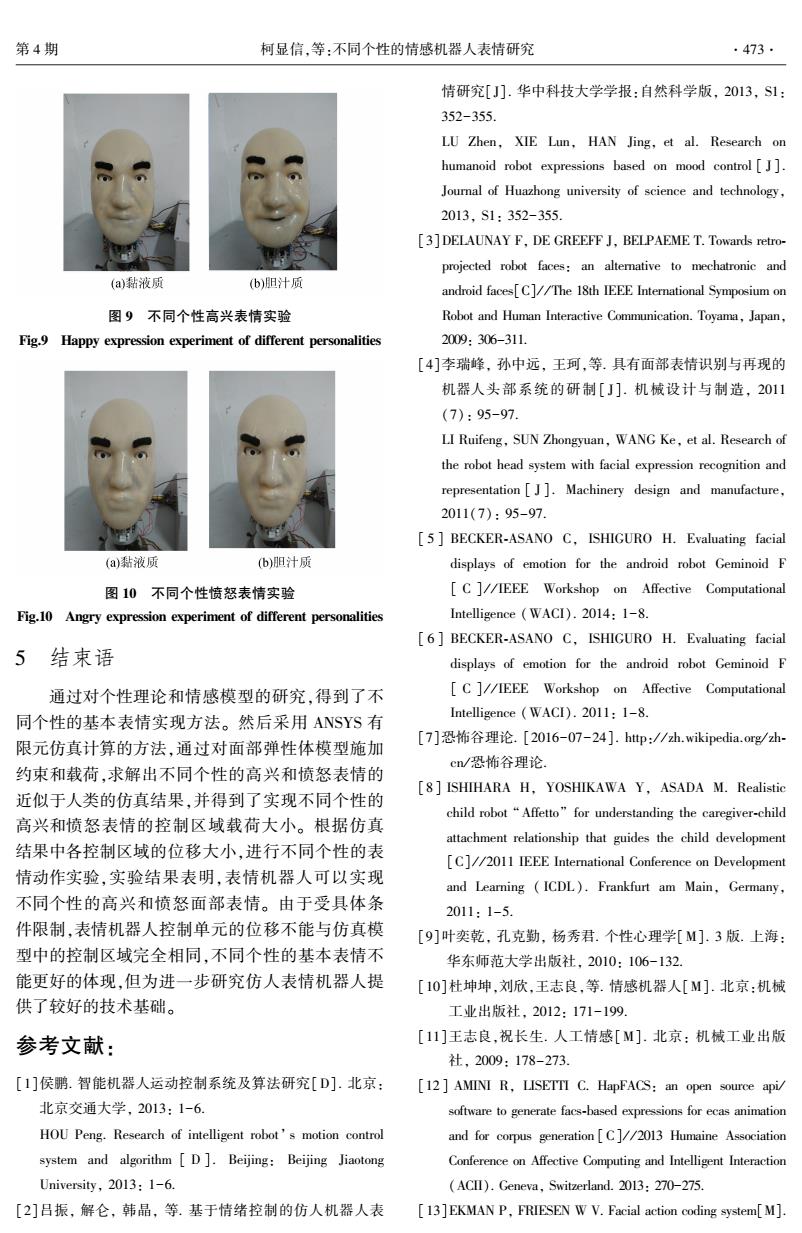
第4期 柯显信,等:不同个性的情感机器人表情研究 .473. 情研究[J].华中科技大学学报:自然科学版,2013,S1: 352-355. LU Zhen,XIE Lun,HAN Jing,et al.Research on humanoid robot expressions based on mood control[J]. Journal of Huazhong university of science and technology, 2013,S1:352-355. [3]DELAUNAY F,DE GREEFF J,BELPAEME T.Towards retro- projected robot faces:an altemative to mechatronic and (a)黏液质 (b)胆汁质 android faces[C]//The 18th IEEE International Symposium on 图9不同个性高兴表情实验 Robot and Human Interactive Communication.Toyama,Japan, Fig.9 Happy expression experiment of different personalities 2009:306-311. [4]李瑞峰,孙中远,王珂,等.具有面部表情识别与再现的 机器人头部系统的研制[J].机械设计与制造,2011 (7):95-97. LI Ruifeng,SUN Zhongyuan,WANG Ke,et al.Research of the robot head system with facial expression recognition and representation[J].Machinery design and manufacture, 2011(7):95-97. [5 BECKER-ASANO C,ISHIGURO H.Evaluating facial (a)黏液质 (b)胆汁质 displays of emotion for the android robot Geminoid F 图10不同个性愤怒表情实验 [C ]//IEEE Workshop on Affective Computational Fig.10 Angry expression experiment of different personalities Intelligence (WACI).2014:1-8. [6 BECKER-ASANO C,ISHIGURO H.Evaluating facial 5结束语 displays of emotion for the android robot Geminoid F 通过对个性理论和情感模型的研究,得到了不 C ]//IEEE Workshop on Affective Computational 同个性的基本表情实现方法。然后采用ANSYS有 Intelligence (WACI).2011:1-8. 限元仿真计算的方法,通过对面部弹性体模型施加 [7]恐怖谷理论.[2016-07-24].htp:/zh.wikipedia.org/zh- cn/恐怖谷理论. 约束和载荷,求解出不同个性的高兴和愤怒表情的 [8 ISHIHARA H,YOSHIKAWA Y,ASADA M.Realistic 近似于人类的仿真结果,并得到了实现不同个性的 child robot"Affetto"for understanding the caregiver-child 高兴和愤怒表情的控制区域载荷大小。根据仿真 attachment relationship that guides the child development 结果中各控制区域的位移大小,进行不同个性的表 [C]//2011 IEEE International Conference on Development 情动作实验,实验结果表明,表情机器人可以实现 and Learning (ICDL).Frankfurt am Main,Germany, 不同个性的高兴和愤怒面部表情。由于受具体条 2011:1-5. 件限制,表情机器人控制单元的位移不能与仿真模 [9]叶奕乾,孔克勤,杨秀君.个性心理学[M].3版.上海: 型中的控制区域完全相同,不同个性的基本表情不 华东师范大学出版社,2010:106-132. 能更好的体现,但为进一步研究仿人表情机器人提 [10]杜坤坤刘欣,王志良,等.情感机器人[M].北京:机械 供了较好的技术基础。 工业出版社,2012:171-199. 参考文献: [11]王志良,祝长生.人工情感[M].北京:机械工业出版 社,2009:178-273. [1]侯鹏.智能机器人运动控制系统及算法研究[D].北京: [12 AMINI R,LISETTI C.HapFACS:an open source api/ 北京交通大学,2013:1-6. software to generate facs-based expressions for ecas animation HOU Peng.Research of intelligent robot's motion control and for corpus generation [C]//2013 Humaine Association system and algorithm[D].Beijing:Beijing Jiaotong Conference on Affective Computing and Intelligent Interaction University,2013:1-6. (ACII).Geneva,Switzerland.2013:270-275. [2]吕振,解仑,韩晶,等.基于情绪控制的仿人机器人表 [13]EKMAN P,FRIESEN W V.Facial action coding system[M].图 9 不同个性高兴表情实验 Fig.9 Happy expression experiment of different personalities 图 10 不同个性愤怒表情实验 Fig.10 Angry expression experiment of different personalities 5 结束语 通过对个性理论和情感模型的研究,得到了不 同个性的基本表情实现方法。 然后采用 ANSYS 有 限元仿真计算的方法,通过对面部弹性体模型施加 约束和载荷,求解出不同个性的高兴和愤怒表情的 近似于人类的仿真结果,并得到了实现不同个性的 高兴和愤怒表情的控制区域载荷大小。 根据仿真 结果中各控制区域的位移大小,进行不同个性的表 情动作实验,实验结果表明,表情机器人可以实现 不同个性的高兴和愤怒面部表情。 由于受具体条 件限制,表情机器人控制单元的位移不能与仿真模 型中的控制区域完全相同,不同个性的基本表情不 能更好的体现,但为进一步研究仿人表情机器人提 供了较好的技术基础。 参考文献: [1]侯鹏. 智能机器人运动控制系统及算法研究[D]. 北京: 北京交通大学, 2013: 1-6. HOU Peng. Research of intelligent robot’ s motion control system and algorithm [ D ]. Beijing: Beijing Jiaotong University, 2013: 1-6. [2]吕振, 解仑, 韩晶, 等. 基于情绪控制的仿人机器人表 情研究[J]. 华中科技大学学报:自然科学版, 2013, S1: 352-355. LU Zhen, XIE Lun, HAN Jing, et al. Research on humanoid robot expressions based on mood control [ J ]. Journal of Huazhong university of science and technology, 2013, S1: 352-355. [3]DELAUNAY F, DE GREEFF J, BELPAEME T. Towards retro⁃ projected robot faces: an alternative to mechatronic and android faces[C] / / The 18th IEEE International Symposium on Robot and Human Interactive Communication. Toyama, Japan, 2009: 306-311. [4]李瑞峰, 孙中远, 王珂,等. 具有面部表情识别与再现的 机器人头部系统的研制[ J]. 机械设计与制造, 2011 (7): 95-97. LI Ruifeng, SUN Zhongyuan, WANG Ke, et al. Research of the robot head system with facial expression recognition and representation [ J ]. Machinery design and manufacture, 2011(7): 95-97. [ 5 ] BECKER⁃ASANO C, ISHIGURO H. Evaluating facial displays of emotion for the android robot Geminoid F [ C ] / / IEEE Workshop on Affective Computational Intelligence (WACI). 2014: 1-8. [ 6 ] BECKER⁃ASANO C, ISHIGURO H. Evaluating facial displays of emotion for the android robot Geminoid F [ C ] / / IEEE Workshop on Affective Computational Intelligence (WACI). 2011: 1-8. [7]恐怖谷理论. [2016-07-24]. http: / / zh.wikipedia.org / zh⁃ cn / 恐怖谷理论. [8] ISHIHARA H, YOSHIKAWA Y, ASADA M. Realistic child robot “Affetto” for understanding the caregiver⁃child attachment relationship that guides the child development [C] / / 2011 IEEE International Conference on Development and Learning ( ICDL ). Frankfurt am Main, Germany, 2011: 1-5. [9]叶奕乾, 孔克勤, 杨秀君. 个性心理学[M]. 3 版. 上海: 华东师范大学出版社, 2010: 106-132. [10]杜坤坤,刘欣,王志良,等. 情感机器人[M]. 北京:机械 工业出版社, 2012: 171-199. [11]王志良,祝长生. 人工情感[M]. 北京: 机械工业出版 社, 2009: 178-273. [12 ] AMINI R, LISETTI C. HapFACS: an open source api/ software to generate facs⁃based expressions for ecas animation and for corpus generation [C] / / 2013 Humaine Association Conference on Affective Computing and Intelligent Interaction (ACII). Geneva, Switzerland. 2013: 270-275. [13]EKMAN P, FRIESEN W V. Facial action coding system[M]. 第 4 期 柯显信,等:不同个性的情感机器人表情研究 ·473·