正在加载图片...
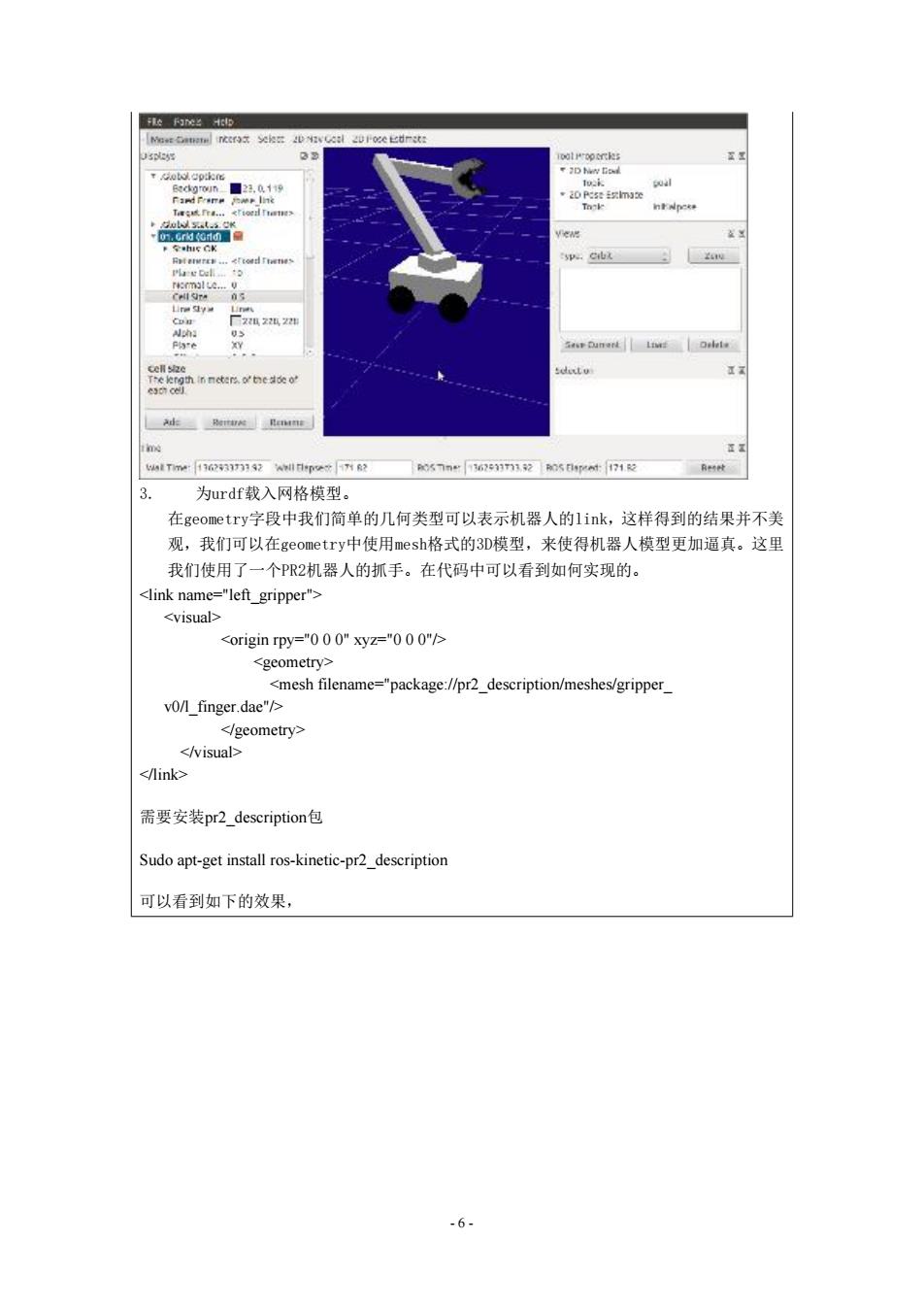
下egB e3 incr3x关r4D2vl0o它c比drt: 32 oal Hropcrles TMotolgotlm D Ny told ■23,0119 60l Tak Tw城r…Ttoed Ttomme> 卡ul以.t-8K ,0仿,Cr01面量 Vens 令hGGK Cb以 川山El‘2 NormalLe...v Cellsie Con 厂22用22瓶22难 Npha 05 日”A Y S Dunent LiMf Drlete inin mcters omedde。 sduito me 江x a1Te13062337392AH716205nn=362539Tm320s4ret1712 3. 为urdf载入网格模型。 在geometry字段中我们简单的几何类型可以表示机器人的1ink,这样得到的结果并不美 观,我们可以在geometry中使用mesh格式的3D模型,来使得机器人模型更加逼真。这里 我们使用了一个P2机器人的抓手。在代码中可以看到如何实现的。 <link name="left_gripper"> <visual> <origin rpy="000"xyz="000"> <geometry> <mesh filename="package://pr2_description/meshes/gripper_ vo/l finger.dae"/> </geometry> </visual> <link> 需要安装pr2 description包 Sudo apt-get install ros-kinetic-pr2_description 可以看到如下的效果, -6-- 6 - 3. 为urdf载入网格模型。 在geometry字段中我们简单的几何类型可以表示机器人的link,这样得到的结果并不美 观,我们可以在geometry中使用mesh格式的3D模型,来使得机器人模型更加逼真。这里 我们使用了一个PR2机器人的抓手。在代码中可以看到如何实现的。 <link name="left_gripper"> <visual> <origin rpy="0 0 0" xyz="0 0 0"/> <geometry> <mesh filename="package://pr2_description/meshes/gripper_ v0/l_finger.dae"/> </geometry> </visual> </link> 需要安装pr2_description包 Sudo apt-get install ros-kinetic-pr2_description 可以看到如下的效果