正在加载图片...
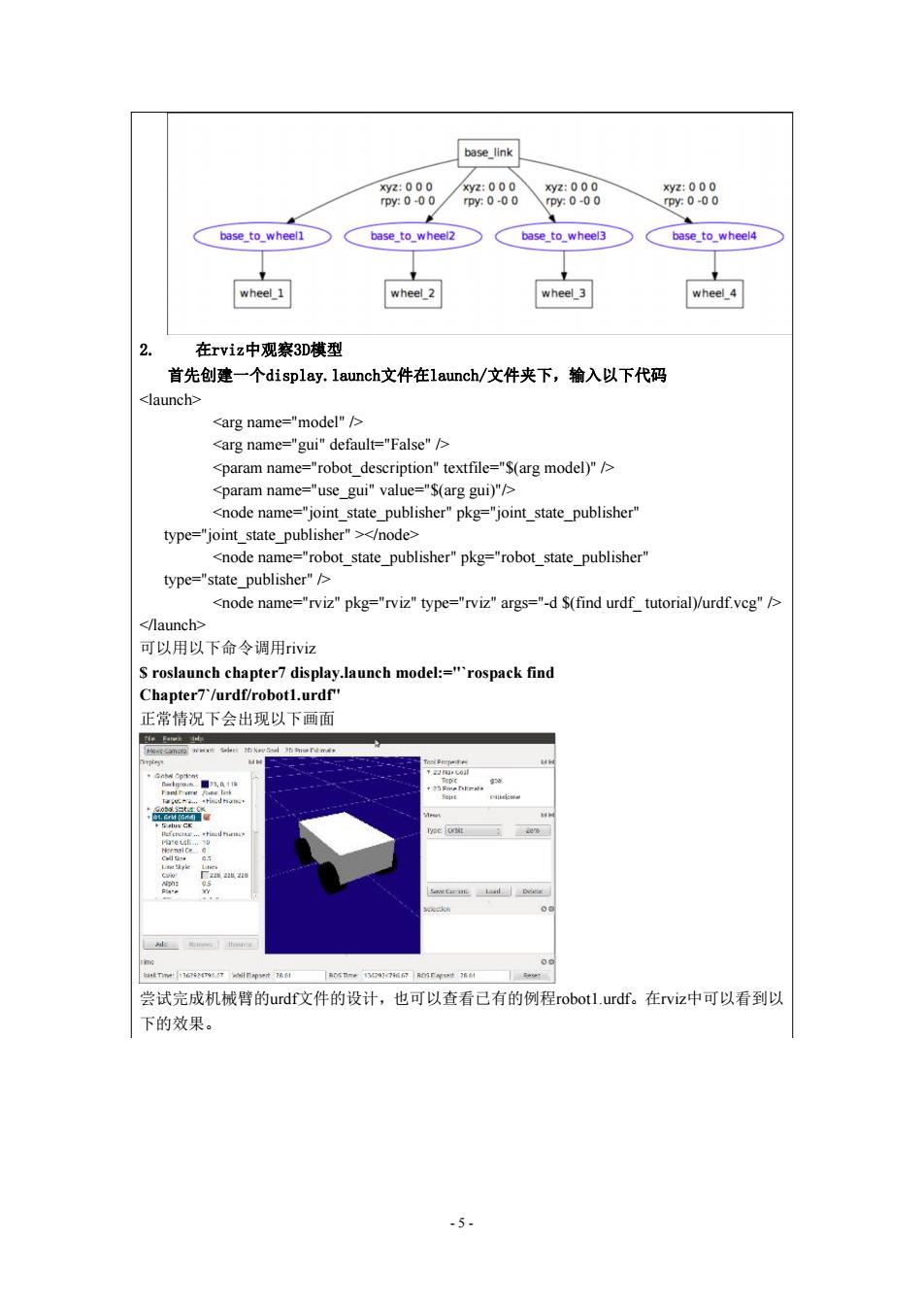
base_link xyz:000 xyz:000 yz:000 xyz:000 py0-00 rpy:0-0 0 py0-00 pr0-00 base to wheell base to wheel2 base to wheel3 base to wheel4 wheel_1 wheel_2 wheel_3 wheel_4 2. 在rviz中观察3D模型 首先创建一个display..launch文件在1 aunch/文件夹下,输入以下代码 <launch> <arg name="model"/> <arg name="gui"default="False"> <param name="robot description"textfile="S(arg model)"/> <param name="use gui"value="S(arg gui)"> <node name="joint state publisher"pkg="joint state publisher" type="joint state publisher"></node> <node name="robot_state_publisher"pkg="robot state publisher" type="state publisher"/> <node name="rviz"pkg="rviz"type="rviz"args="-d $(find urdf tutorial)/urdf.vcg"> </launch> 可以用以下命令调用riviz S roslaunch chapter7 display.launch model:="rospack find Chapter7/urdf/robot1.urdf" 正常情况下会出现以下画面 35 surhtee 制4tT3652r9rpt7B1 声06nm976价0的r07准61 尝试完成机械臂的urdf文件的设计,也可以查看己有的例程robotl.urdf。在rviz中可以看到以 下的效果。 -5-- 5 - 2. 在rviz中观察3D模型 首先创建一个display.launch文件在launch/文件夹下,输入以下代码 <launch> <arg name="model" /> <arg name="gui" default="False" /> <param name="robot_description" textfile="$(arg model)" /> <param name="use_gui" value="$(arg gui)"/> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_ tutorial)/urdf.vcg" /> </launch> 可以用以下命令调用riviz $ roslaunch chapter7 display.launch model:="`rospack find Chapter7`/urdf/robot1.urdf" 正常情况下会出现以下画面 尝试完成机械臂的urdf文件的设计,也可以查看已有的例程robot1.urdf。在rviz中可以看到以 下的效果