正在加载图片...
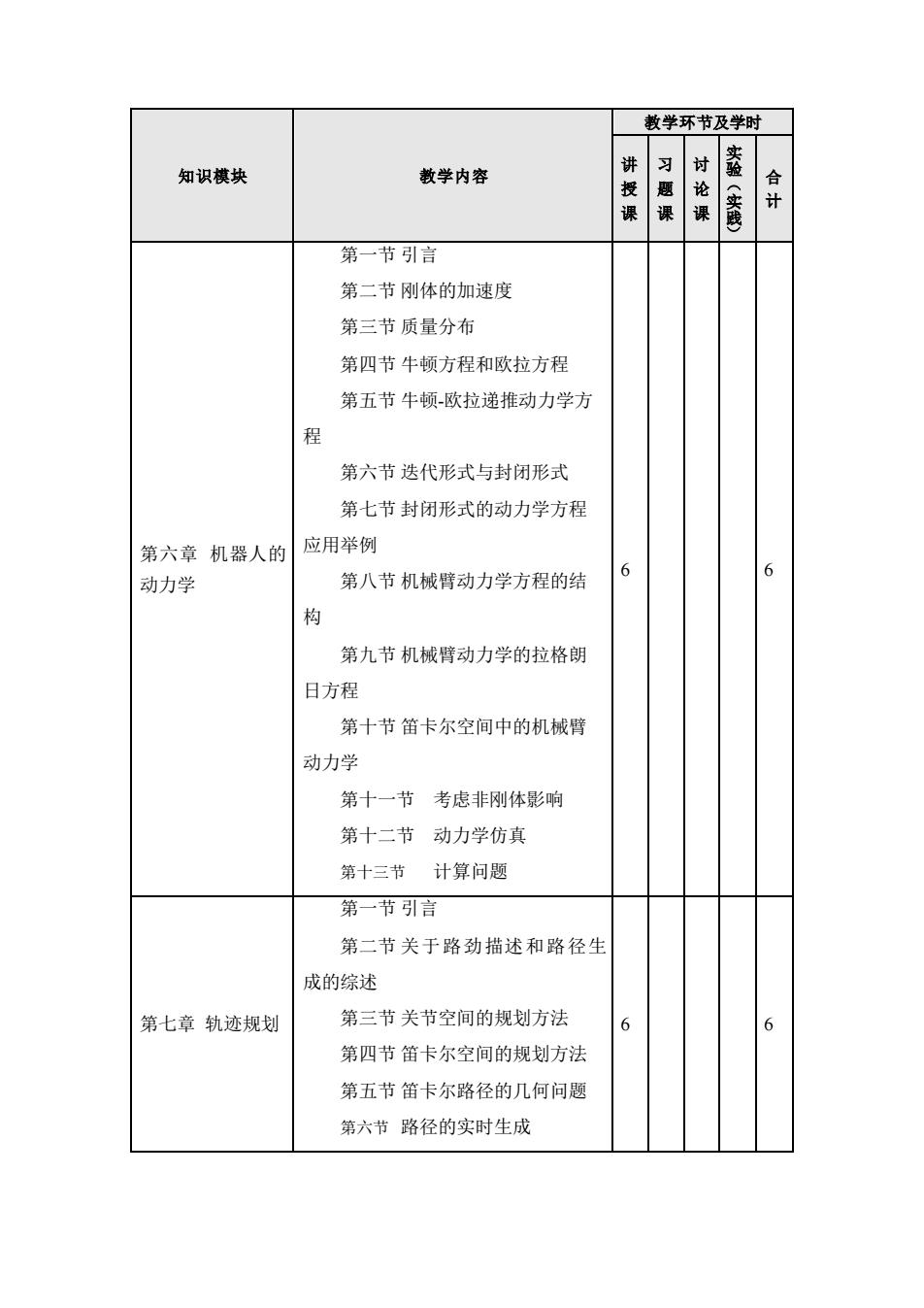
教学环节及学时 知识模块 教学内容 讲授课 习 课 讨论课 实验(实戰) 弃 第一节引言 第二节刚体的加速度 第三节质量分布 第四节牛顿方程和欧拉方程 第五节牛顿欧拉递推动力学方 程 第六节迭代形式与封闭形式 第七节封闭形式的动力学方程 第六章机器人的 应用举例 6 6 动力学 第八节机械臂动力学方程的结 构 第九节机械臂动力学的拉格朗 日方程 第十节笛卡尔空间中的机械臂 动力学 第十一节考虑非刚体影响 第十二节动力学仿真 第十三节 计算问题 第一节引言 第二节关于路劲描述和路径生 成的综述 第七章轨迹规划 第三节关节空间的规划方法 6 6 第四节笛卡尔空间的规划方法 第五节笛卡尔路径的几何问题 第六节路径的实时生成知识模块 教学内容 教学环节及学时 讲 授 课 习 题 课 讨 论 课 实 验 ( 实 践 ) 合 计 第六章 机器人的 动力学 第一节 引言 第二节 刚体的加速度 第三节 质量分布 第四节 牛顿方程和欧拉方程 第五节 牛顿-欧拉递推动力学方 程 第六节 迭代形式与封闭形式 第七节 封闭形式的动力学方程 应用举例 第八节 机械臂动力学方程的结 构 第九节 机械臂动力学的拉格朗 日方程 第十节 笛卡尔空间中的机械臂 动力学 第十一节 考虑非刚体影响 第十二节 动力学仿真 第十三节 计算问题 6 6 第七章 轨迹规划 第一节 引言 第二节 关于路劲描述和路径生 成的综述 第三节 关节空间的规划方法 第四节 笛卡尔空间的规划方法 第五节 笛卡尔路径的几何问题 第六节 路径的实时生成 6 6