正在加载图片...
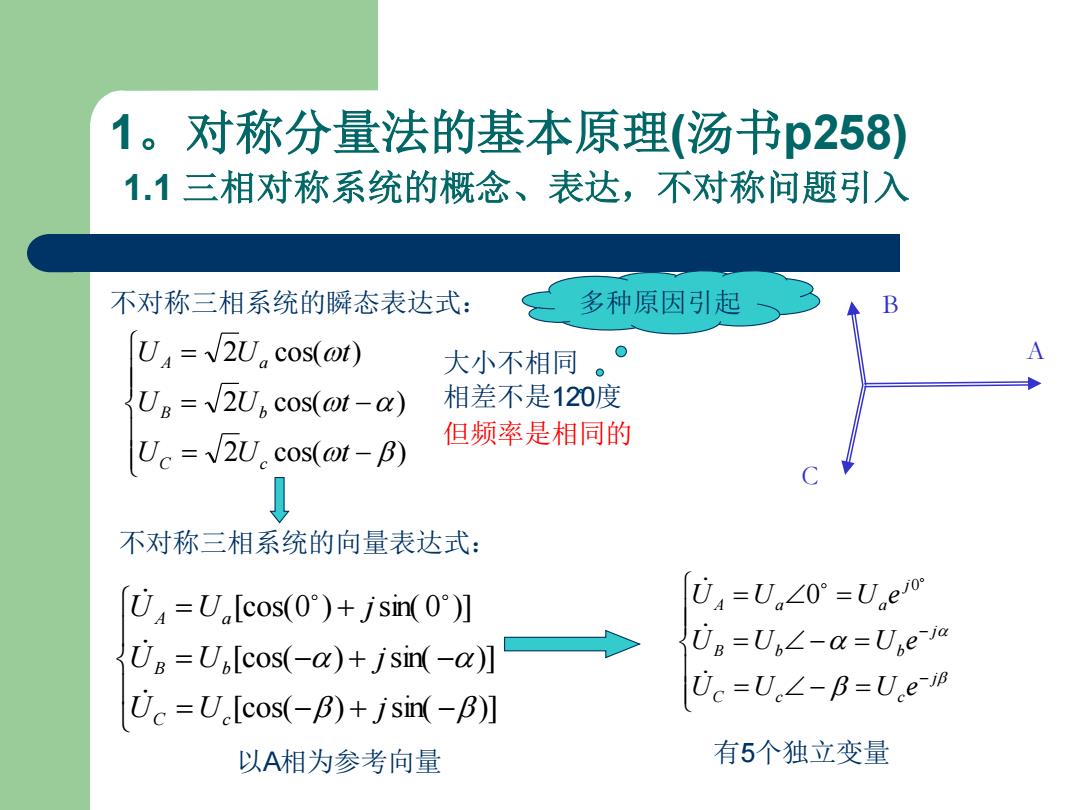
1。对称分量法的基本原理(汤书p258) 1.1三相对称系统的概念、表达,不对称问题引入 不对称三相系统的瞬态表达式: 多种原因引起 U=2Ucos(@t) 大小不相同 。0 Ug=2U,cos(@t-a) 相差不是120度 Uc=2U.cos(@t-B) 但频率是相同的 ↓ 不对称三相系统的向量表达式: U=U[cos(0)+jsin()] 04=Un∠0°=U,e0 Ug =U[cos(-a)+jsin(-a)] Ug=Ub∠-a=Uea 0c=U.∠-B=U.eB Uc=U.[cos(-B)+jsin(-B)] 以A相为参考向量 有5个独立变量1。对称分量法的基本原理(汤书p258) 1.1 三相对称系统的概念、表达,不对称问题引入 不对称三相系统的瞬态表达式: = − = − = 2 cos( ) 2 cos( ) 2 cos( ) U U t U U t U U t C c B b A a 不对称三相系统的向量表达式: = − + − = − + − = + [cos( ) sin( )] [cos( ) sin( )] [cos(0 ) sin( 0 )] U U j U U j U U j C c B b A a = − = = − = = = − − j C c c j B b b j A a a U U U e U U U e U U U e 0 0 以A相为参考向量 有5个独立变量 大小不相同 相差不是120度 但频率是相同的 多种原因引起 A B C