正在加载图片...
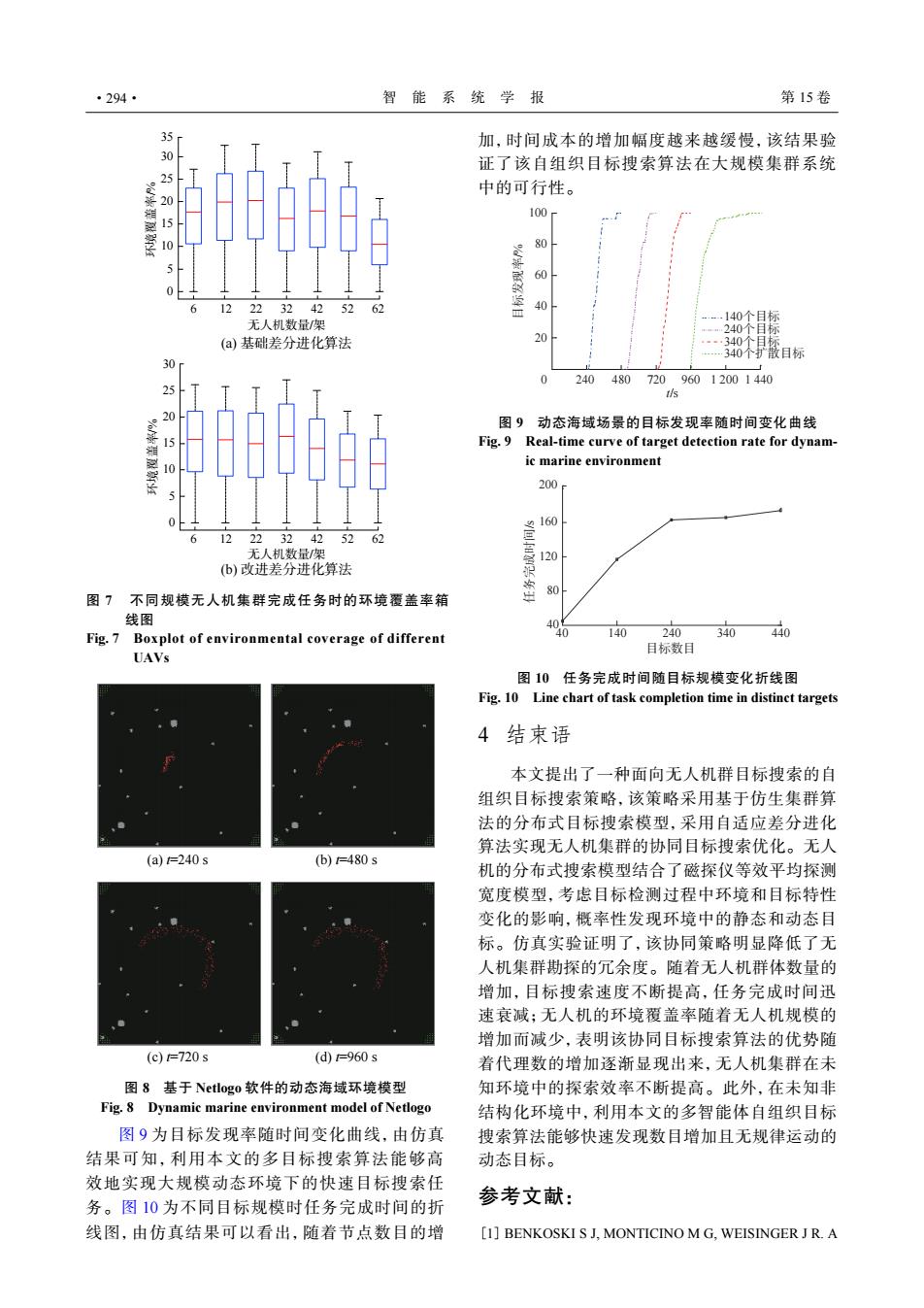
·294· 智能系统学报 第15卷 35 加,时间成本的增加幅度越来越缓慢,该结果验 30 证了该自组织目标搜索算法在大规模集群系统 22 中的可行性。 20 100 15 10 0 12 223242 52 62 0 -.-.140个目标 无人机数量架 …240个目标 (a)基础差分进化算法 0 240 480 720 96012001440 25 s 图9动态海域场景的目标发现率随时间变化曲线 Fig.9 Real-time curve of target detection rate for dynam- ic marine environment 200 6 1222324252 62 无人机数量/架 (b)改进差分进化算法 80 图7不同规模无人机集群完成任务时的环境覆盖率箱 线图 40 Fig.7 Boxplot of environmental coverage of different 40 140 240 340440 目标数目 UAVs 图10任务完成时间随目标规模变化折线图 Fig.10 Line chart of task completion time in distinct targets 4结束语 本文提出了一种面向无人机群目标搜索的自 组织目标搜索策略,该策略采用基于仿生集群算 法的分布式目标搜索模型,采用自适应差分进化 算法实现无人机集群的协同目标搜索优化。无人 (a)=240s (b)=480s 机的分布式搜索模型结合了磁探仪等效平均探测 宽度模型,考虑目标检测过程中环境和目标特性 变化的影响,概率性发现环境中的静态和动态目 标。仿真实验证明了,该协同策略明显降低了无 人机集群勘探的冗余度。随着无人机群体数量的 增加,目标搜索速度不断提高,任务完成时间迅 速衰减;无人机的环境覆盖率随着无人机规模的 增加而减少,表明该协同目标搜索算法的优势随 (c)=720s (d=960s 着代理数的增加逐渐显现出来,无人机集群在未 图8基于Netlogo软件的动态海域环境模型 知环境中的探索效率不断提高。此外,在未知非 Fig.8 Dynamic marine environment model of Netlogo 结构化环境中,利用本文的多智能体自组织目标 图9为目标发现率随时间变化曲线,由仿真 搜索算法能够快速发现数目增加且无规律运动的 结果可知,利用本文的多目标搜索算法能够高 动态目标。 效地实现大规模动态环境下的快速目标搜索任 务。图10为不同目标规模时任务完成时间的折 参考文献: 线图,由仿真结果可以看出,随着节点数目的增 [1]BENKOSKI S J,MONTICINO M G,WEISINGER J R.A0 5 10 15 20 25 30 35 6 12 22 32 42 52 62 无人机数量/架 环境覆盖率/% (a) 基础差分进化算法 (b) 改进差分进化算法 0 5 10 15 20 25 30 6 12 22 32 42 52 62 环境覆盖率/% 无人机数量/架 图 7 不同规模无人机集群完成任务时的环境覆盖率箱 线图 Fig. 7 Boxplot of environmental coverage of different UAVs (a) t=240 s (b) t=480 s (c) t=720 s (d) t=960 s 图 8 基于 Netlogo 软件的动态海域环境模型 Fig. 8 Dynamic marine environment model of Netlogo 图 9 为目标发现率随时间变化曲线,由仿真 结果可知,利用本文的多目标搜索算法能够高 效地实现大规模动态环境下的快速目标搜索任 务。图 10 为不同目标规模时任务完成时间的折 线图,由仿真结果可以看出,随着节点数目的增 加,时间成本的增加幅度越来越缓慢,该结果验 证了该自组织目标搜索算法在大规模集群系统 中的可行性。 0 240 480 720 960 1 200 1 440 20 40 60 80 100 140个目标 240个目标 340个目标 340个扩散目标 目标发现率/% t/s 图 9 动态海域场景的目标发现率随时间变化曲线 Fig. 9 Real-time curve of target detection rate for dynamic marine environment 40 140 240 340 440 40 80 120 160 200 目标数目 任务完成时间/s 图 10 任务完成时间随目标规模变化折线图 Fig. 10 Line chart of task completion time in distinct targets 4 结束语 本文提出了一种面向无人机群目标搜索的自 组织目标搜索策略,该策略采用基于仿生集群算 法的分布式目标搜索模型,采用自适应差分进化 算法实现无人机集群的协同目标搜索优化。无人 机的分布式搜索模型结合了磁探仪等效平均探测 宽度模型,考虑目标检测过程中环境和目标特性 变化的影响,概率性发现环境中的静态和动态目 标。仿真实验证明了,该协同策略明显降低了无 人机集群勘探的冗余度。随着无人机群体数量的 增加,目标搜索速度不断提高,任务完成时间迅 速衰减;无人机的环境覆盖率随着无人机规模的 增加而减少,表明该协同目标搜索算法的优势随 着代理数的增加逐渐显现出来,无人机集群在未 知环境中的探索效率不断提高。此外,在未知非 结构化环境中,利用本文的多智能体自组织目标 搜索算法能够快速发现数目增加且无规律运动的 动态目标。 参考文献: [1] BENKOSKI S J, MONTICINO M G, WEISINGER J R. A ·294· 智 能 系 统 学 报 第 15 卷