正在加载图片...
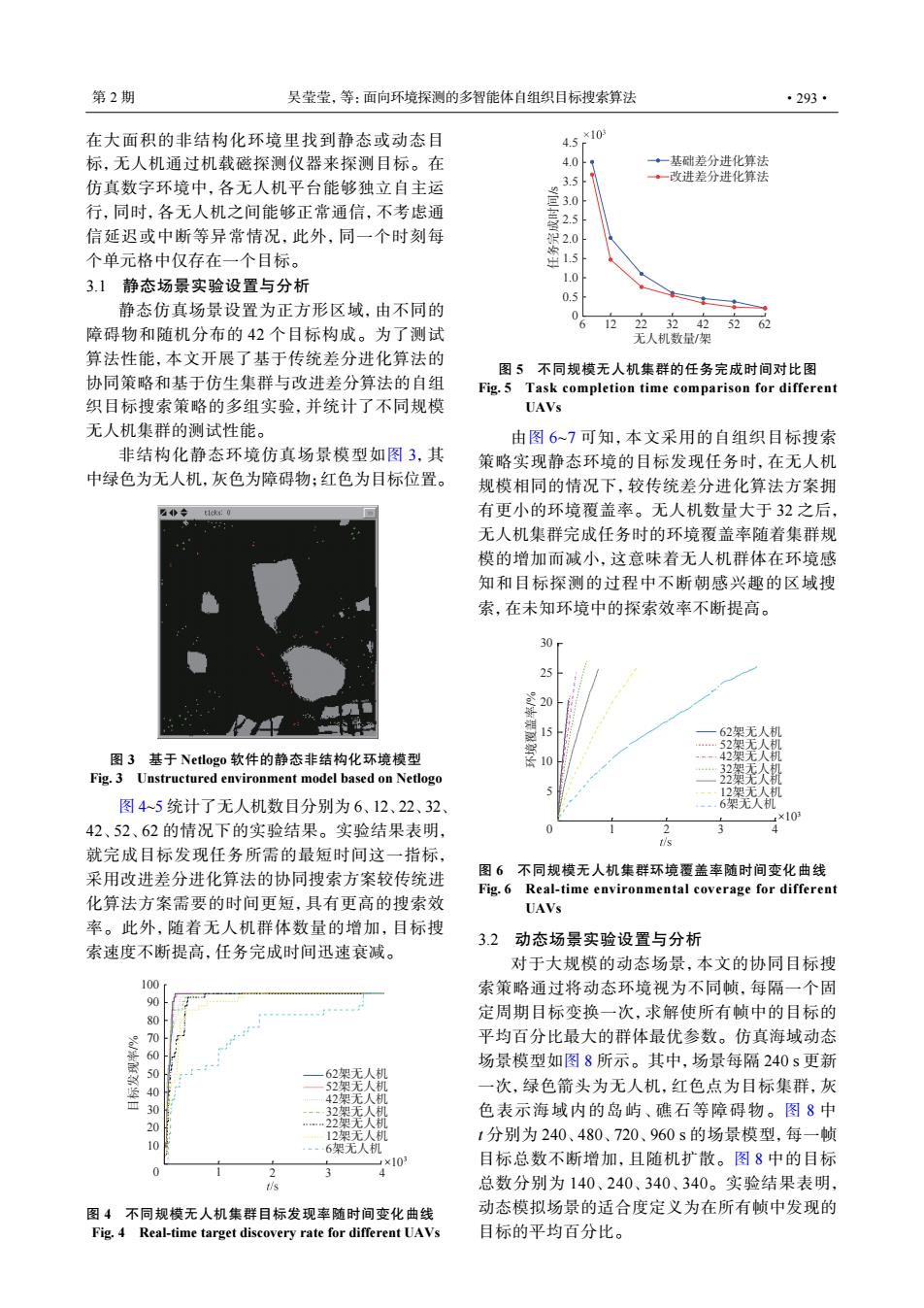
第2期 吴莹莹,等:面向环境探测的多智能体自组织目标搜索算法 ·293· 在大面积的非结构化环境里找到静态或动态目 45*10 标,无人机通过机载磁探测仪器来探测目标。在 4.0 ·一基础差分进化算法 仿真数字环境中,各无人机平台能够独立自主运 3.5 ·一改进差分进化算法 萱3.0 行,同时,各无人机之间能够正常通信,不考虑通 5 信延迟或中断等异常情况,此外,同一个时刻每 个单元格中仅存在一个目标。 3.1静态场景实验设置与分析 1.0 0.5 静态仿真场景设置为正方形区域,由不同的 障碍物和随机分布的42个目标构成。为了测试 122232425262 无人机数量架 算法性能,本文开展了基于传统差分进化算法的 图5不同规模无人机集群的任务完成时间对比图 协同策略和基于仿生集群与改进差分算法的自组 Fig.5 Task completion time comparison for different 织目标搜索策略的多组实验,并统计了不同规模 UAVs 无人机集群的测试性能。 由图6~7可知,本文采用的自组织目标搜索 非结构化静态环境仿真场景模型如图3,其 策略实现静态环境的目标发现任务时,在无人机 中绿色为无人机,灰色为障碍物:红色为目标位置。 规模相同的情况下,较传统差分进化算法方案拥 有更小的环境覆盖率。无人机数量大于32之后, 无人机集群完成任务时的环境覆盖率随着集群规 模的增加而减小,这意味着无人机群体在环境感 知和目标探测的过程中不断朝感兴趣的区域搜 索,在未知环境中的探索效率不断提高。 5 一62架无人机 图3基于Netlogo软件的静态非结构化环境模型 10 42 Fig.3 Unstructured environment model based on Netlogo 12架无人机 图45统计了无人机数目分别为6、12、22、32 6架无人机 10 42、52、62的情况下的实验结果。实验结果表明, 4 tis 就完成目标发现任务所需的最短时间这一指标, 采用改进差分进化算法的协同搜索方案较传统进 图6不同规模无人机集群环境覆盖率随时间变化曲线 Fig.6 Real-time environmental coverage for different 化算法方案需要的时间更短,具有更高的搜索效 UAVs 率。此外,随着无人机群体数量的增加,目标搜 3.2动态场景实验设置与分析 索速度不断提高,任务完成时间迅速衰减。 对于大规模的动态场景,本文的协同目标搜 100 索策略通过将动态环境视为不同帧,每隔一个固 % o 定周期目标变换一次,求解使所有帧中的目标的 平均百分比最大的群体最优参数。仿真海域动态 场景模型如图8所示。其中,场景每隔240s更新 0 -62架无人机 52架无人机 一次,绿色箭头为无人机,红色点为目标集群,灰 42架无人机 3 32架无人机 色表示海域内的岛屿、礁石等障碍物。图8中 20 .22架无人机 12架无人机 1分别为240、480、720、960s的场景模型,每一帧 6架无人机 ×103 目标总数不断增加,且随机扩散。图8中的目标 0 3 4 总数分别为140、240、340、340。实验结果表明, 图4不同规模无人机集群目标发现率随时间变化曲线 动态模拟场景的适合度定义为在所有帧中发现的 Fig.4 Real-time target discovery rate for different UAVs 目标的平均百分比。在大面积的非结构化环境里找到静态或动态目 标,无人机通过机载磁探测仪器来探测目标。在 仿真数字环境中,各无人机平台能够独立自主运 行,同时,各无人机之间能够正常通信,不考虑通 信延迟或中断等异常情况,此外,同一个时刻每 个单元格中仅存在一个目标。 3.1 静态场景实验设置与分析 静态仿真场景设置为正方形区域,由不同的 障碍物和随机分布的 42 个目标构成。为了测试 算法性能,本文开展了基于传统差分进化算法的 协同策略和基于仿生集群与改进差分算法的自组 织目标搜索策略的多组实验,并统计了不同规模 无人机集群的测试性能。 非结构化静态环境仿真场景模型如图 3,其 中绿色为无人机,灰色为障碍物;红色为目标位置。 图 3 基于 Netlogo 软件的静态非结构化环境模型 Fig. 3 Unstructured environment model based on Netlogo 图 4~5 统计了无人机数目分别为 6、12、22、32、 42、52、62 的情况下的实验结果。实验结果表明, 就完成目标发现任务所需的最短时间这一指标, 采用改进差分进化算法的协同搜索方案较传统进 化算法方案需要的时间更短,具有更高的搜索效 率。此外,随着无人机群体数量的增加,目标搜 索速度不断提高,任务完成时间迅速衰减。 1 2 3 4 ×103 0 10 20 30 40 50 60 70 80 90 100 62架无人机 52架无人机 42架无人机 32架无人机 22架无人机 12架无人机 6架无人机 目标发现率/% 图 4 不同规模无人机集群目标发现率随时间变化曲线 Fig. 4 Real-time target discovery rate for different UAVs 6 12 22 32 42 52 62 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 基础差分进化算法 改进差分进化算法 任务完成时间/s 无人机数量/架 图 5 不同规模无人机集群的任务完成时间对比图 Fig. 5 Task completion time comparison for different UAVs 由图 6~7 可知,本文采用的自组织目标搜索 策略实现静态环境的目标发现任务时,在无人机 规模相同的情况下,较传统差分进化算法方案拥 有更小的环境覆盖率。无人机数量大于 32 之后, 无人机集群完成任务时的环境覆盖率随着集群规 模的增加而减小,这意味着无人机群体在环境感 知和目标探测的过程中不断朝感兴趣的区域搜 索,在未知环境中的探索效率不断提高。 0 1 2 3 4 ×103 5 10 15 20 25 30 62架无人机 52架无人机 42架无人机 32架无人机 22架无人机 12架无人机 6架无人机 环境覆盖率/% 图 6 不同规模无人机集群环境覆盖率随时间变化曲线 Fig. 6 Real-time environmental coverage for different UAVs 3.2 动态场景实验设置与分析 对于大规模的动态场景,本文的协同目标搜 索策略通过将动态环境视为不同帧,每隔一个固 定周期目标变换一次,求解使所有帧中的目标的 平均百分比最大的群体最优参数。仿真海域动态 场景模型如图 8 所示。其中,场景每隔 240 s 更新 一次,绿色箭头为无人机,红色点为目标集群,灰 色表示海域内的岛屿、礁石等障碍物。图 8 中 t 分别为 240、480、720、960 s 的场景模型,每一帧 目标总数不断增加,且随机扩散。图 8 中的目标 总数分别为 140、240、340、340。实验结果表明, 动态模拟场景的适合度定义为在所有帧中发现的 目标的平均百分比。 第 2 期 吴莹莹,等:面向环境探测的多智能体自组织目标搜索算法 ·293·