正在加载图片...
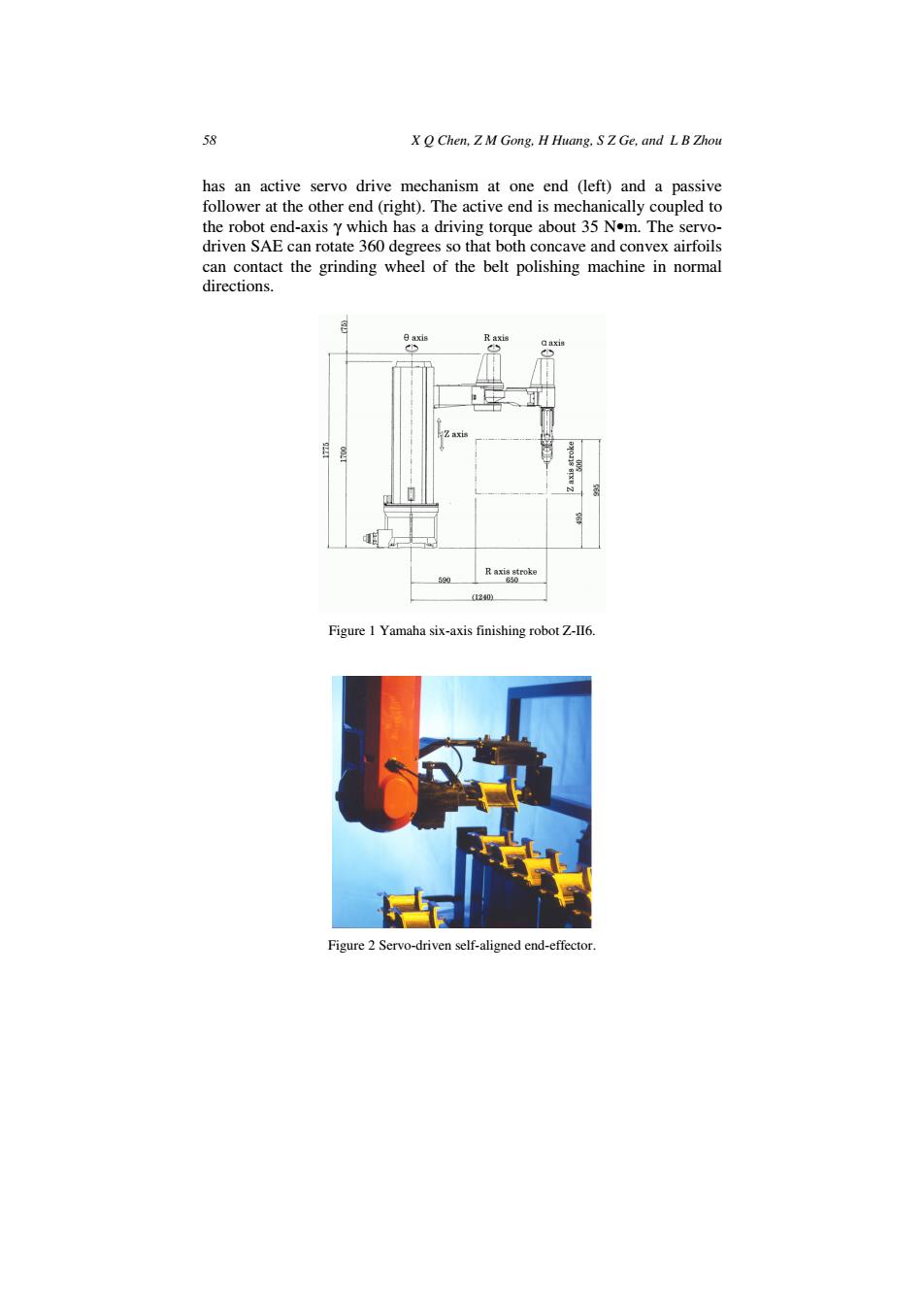
58 X Q Chen,Z M Gong.H Huang.S Z Ge,and L B Zhou has an active servo drive mechanism at one end (left)and a passive follower at the other end (right).The active end is mechanically coupled to the robot end-axis y which has a driving torque about 35 Nem.The servo- driven SAE can rotate 360 degrees so that both concave and convex airfoils can contact the grinding wheel of the belt polishing machine in normal directions. 50 axigroke 240 Figure 1 Yamaha six-axis finishing robot Z-I6. Figure 2 Servo-driven self-aligned end-effector58 X Q Chen, Z M Gong, H Huang, S Z Ge, and L B Zhou has an active servo drive mechanism at one end (left) and a passive follower at the other end (right). The active end is mechanically coupled to the robot end-axis γ which has a driving torque about 35 N•m. The servodriven SAE can rotate 360 degrees so that both concave and convex airfoils can contact the grinding wheel of the belt polishing machine in normal directions. Figure 1 Yamaha six-axis finishing robot Z-II6. Figure 2 Servo-driven self-aligned end-effector