正在加载图片...
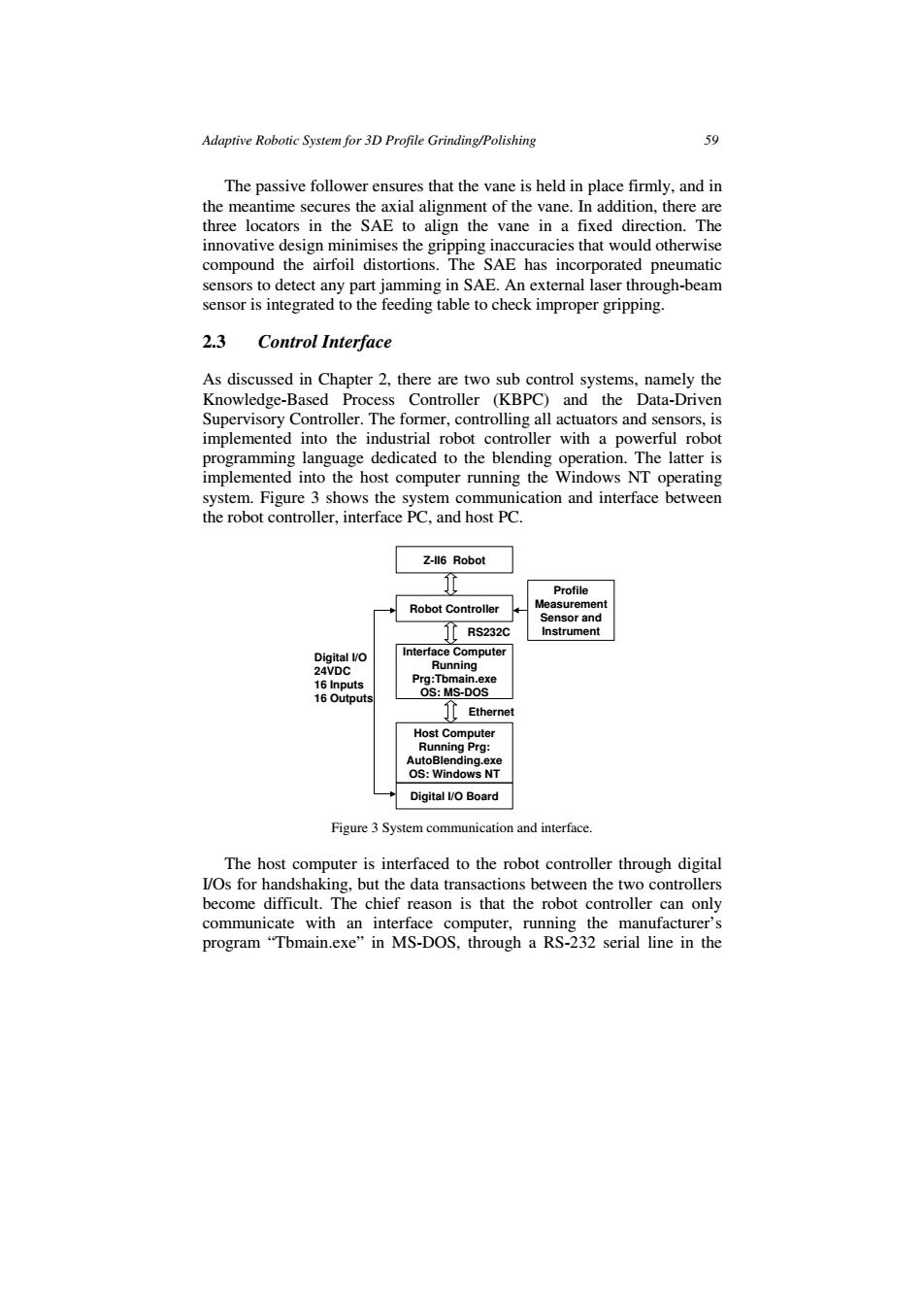
Adaptive Robotic System for 3D Profile Grinding/Polishing 59 The passive follower ensures that the vane is held in place firmly,and in the meantime secures the axial alignment of the vane.In addition,there are three locators in the SAE to align the vane in a fixed direction.The innovative design minimises the gripping inaccuracies that would otherwise compound the airfoil distortions.The SAE has incorporated pneumatic sensors to detect any part jamming in SAE.An external laser through-beam sensor is integrated to the feeding table to check improper gripping. 2.3 Control Interface As discussed in Chapter 2,there are two sub control systems,namely the Knowledge-Based Process Controller (KBPC)and the Data-Driven Supervisory Controller.The former,controlling all actuators and sensors,is implemented into the industrial robot controller with a powerful robot programming language dedicated to the blending operation.The latter is implemented into the host computer running the Windows NT operating system.Figure 3 shows the system communication and interface between the robot controller,interface PC.and host PC Z-1l6 Robot 少 Profile Robot Controller Measurement Sensor and RS232C Instrument Digital VO Interface Computer 24VDC Running 16 Inputs Prg:Tbmain.exe 16 Outputs OS:MS-DOS T Ethernet Host Computer Running Prg: AutoBlending.exe OS:Windows NT Digital l/O Board Figure 3 System communication and interface. The host computer is interfaced to the robot controller through digital I/Os for handshaking,but the data transactions between the two controllers become difficult.The chief reason is that the robot controller can only communicate with an interface computer,running the manufacturer's program "Tbmain.exe"in MS-DOS,through a RS-232 serial line in theAdaptive Robotic System for 3D Profile Grinding/Polishing 59 The passive follower ensures that the vane is held in place firmly, and in the meantime secures the axial alignment of the vane. In addition, there are three locators in the SAE to align the vane in a fixed direction. The innovative design minimises the gripping inaccuracies that would otherwise compound the airfoil distortions. The SAE has incorporated pneumatic sensors to detect any part jamming in SAE. An external laser through-beam sensor is integrated to the feeding table to check improper gripping. 2.3 Control Interface As discussed in Chapter 2, there are two sub control systems, namely the Knowledge-Based Process Controller (KBPC) and the Data-Driven Supervisory Controller. The former, controlling all actuators and sensors, is implemented into the industrial robot controller with a powerful robot programming language dedicated to the blending operation. The latter is implemented into the host computer running the Windows NT operating system. Figure 3 shows the system communication and interface between the robot controller, interface PC, and host PC. Z-II6 Robot Robot Controller Profile Measurement Sensor and Instrument Interface Computer Running Prg:Tbmain.exe OS: MS-DOS Host Computer Running Prg: AutoBlending.exe OS: Windows NT Digital I/O Board Ethernet RS232C Digital I/O 24VDC 16 Inputs 16 Outputs Figure 3 System communication and interface. The host computer is interfaced to the robot controller through digital I/Os for handshaking, but the data transactions between the two controllers become difficult. The chief reason is that the robot controller can only communicate with an interface computer, running the manufacturer’s program “Tbmain.exe” in MS-DOS, through a RS-232 serial line in the