正在加载图片...
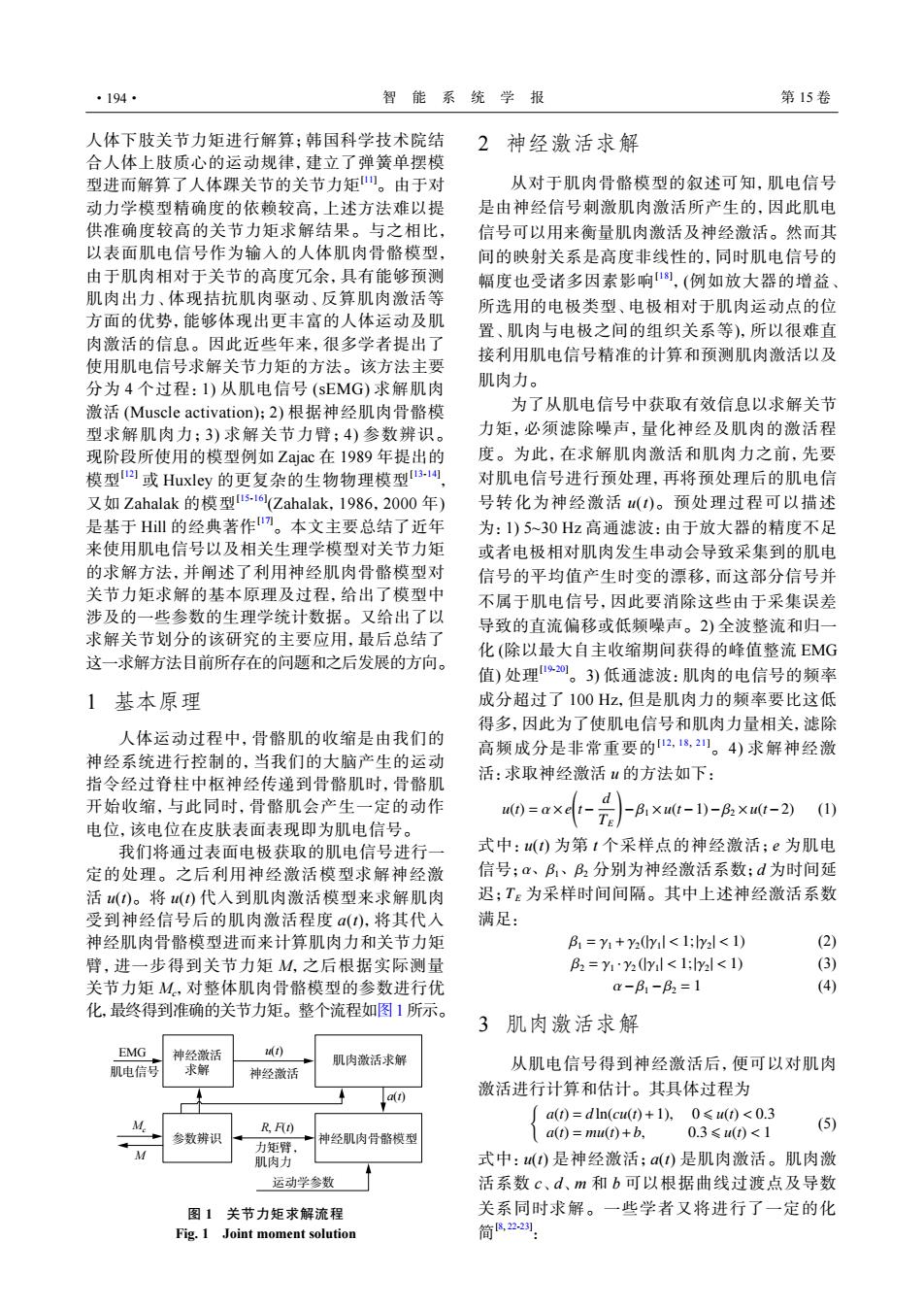
·194· 智能系统学报 第15卷 人体下肢关节力矩进行解算;韩国科学技术院结 2神经激活求解 合人体上肢质心的运动规律,建立了弹簧单摆模 型进而解算了人体踝关节的关节力矩。由于对 从对于肌肉骨骼模型的叙述可知,肌电信号 动力学模型精确度的依赖较高,上述方法难以提 是由神经信号刺激肌肉激活所产生的,因此肌电 供准确度较高的关节力矩求解结果。与之相比, 信号可以用来衡量肌肉激活及神经激活。然而其 以表面肌电信号作为输入的人体肌肉骨骼模型, 间的映射关系是高度非线性的,同时肌电信号的 由于肌肉相对于关节的高度冗余,具有能够预测 幅度也受诸多因素影响),(例如放大器的增益、 肌肉出力、体现拮抗肌肉驱动、反算肌肉激活等 所选用的电极类型、电极相对于肌肉运动点的位 方面的优势,能够体现出更丰富的人体运动及肌 置、肌肉与电极之间的组织关系等),所以很难直 肉激活的信息。因此近些年来,很多学者提出了 接利用肌电信号精准的计算和预测肌肉激活以及 使用肌电信号求解关节力矩的方法。该方法主要 分为4个过程:1)从肌电信号(sEMG)求解肌肉 肌肉力。 激活(Muscle activation):2)根据神经肌肉骨骼模 为了从肌电信号中获取有效信息以求解关节 型求解肌肉力;3)求解关节力臂;4)参数辨识。 力矩,必须滤除噪声,量化神经及肌肉的激活程 现阶段所使用的模型例如Zajac在1989年提出的 度。为此,在求解肌肉激活和肌肉力之前,先要 模型a或Huxley的更复杂的生物物理模型3 对肌电信号进行预处理,再将预处理后的肌电信 又如Zahalak的模型s-16(Zahalak,1986,2000年) 号转化为神经激活()。预处理过程可以描述 是基于H的经典著作7。本文主要总结了近年 为:1)5~30Hz高通滤波:由于放大器的精度不足 来使用肌电信号以及相关生理学模型对关节力矩 或者电极相对肌肉发生串动会导致采集到的肌电 的求解方法,并阐述了利用神经肌肉骨骼模型对 信号的平均值产生时变的漂移,而这部分信号并 关节力矩求解的基本原理及过程,给出了模型中 不属于肌电信号,因此要消除这些由于采集误差 涉及的一些参数的生理学统计数据。又给出了以 导致的直流偏移或低频噪声。2)全波整流和归 求解关节划分的该研究的主要应用,最后总结了 化(除以最大自主收缩期间获得的峰值整流EMG 这一求解方法目前所存在的问题和之后发展的方向。 值)处理刘。3)低通滤波:肌肉的电信号的频率 基本原理 成分超过了100Hz,但是肌肉力的频率要比这低 得多,因此为了使肌电信号和肌肉力量相关,滤除 人体运动过程中,骨骼肌的收缩是由我们的 高频成分是非常重要的2,182川。4)求解神经激 神经系统进行控制的,当我们的大脑产生的运动 指令经过脊柱中枢神经传递到骨骼肌时,骨骼肌 活:求取神经激活u的方法如下: 开始收缩,与此同时,骨骼肌会产生一定的动作 0=a×t-T d -B1×u(t-1)-B2×ut-2) (1) 电位,该电位在皮肤表面表现即为肌电信号。 我们将通过表面电极获取的肌电信号进行一 式中:u(t)为第1个采样点的神经激活;e为肌电 定的处理。之后利用神经激活模型求解神经激 信号;a、B,、B2分别为神经激活系数;d为时间延 活()。将()代人到肌肉激活模型来求解肌肉 迟;TE为采样时间间隔。其中上述神经激活系数 受到神经信号后的肌肉激活程度α(t),将其代入 满足: 神经肌肉骨骼模型进而来计算肌肉力和关节力矩 B=1+y2yl<1;y2l<1) (2) 臂,进一步得到关节力矩M,之后根据实际测量 B2=YY(lyil 1:lyal <1) (3) 关节力矩M。,对整体肌肉骨骼模型的参数进行优 a-B1-p2=1 (4) 化,最终得到准确的关节力矩。整个流程如图1所示。 J 肌肉激活求解 EMG 神经激活 u(1) 肌肉激活求解 肌电信号 求解 从肌电信号得到神经激活后,便可以对肌肉 神经激活 激活进行计算和估计。其具体过程为 a(t) a(t)=dln(cu(t)+1),0≤(t)<0.3 M R,Ft) a(t)=mu(t)+b, 0.3≤(t)<1 (5) 参数辨识 力矩臂 神经肌肉骨酪模型 肌肉力 式中:(1)是神经激活;a(t)是肌肉激活。肌肉激 运动学参数 活系数c、d、m和b可以根据曲线过渡点及导数 图1关节力矩求解流程 关系同时求解。一些学者又将进行了一定的化 Fig.1 Joint moment solution 简822人体下肢关节力矩进行解算;韩国科学技术院结 合人体上肢质心的运动规律,建立了弹簧单摆模 型进而解算了人体踝关节的关节力矩[11]。由于对 动力学模型精确度的依赖较高,上述方法难以提 供准确度较高的关节力矩求解结果。与之相比, 以表面肌电信号作为输入的人体肌肉骨骼模型, 由于肌肉相对于关节的高度冗余,具有能够预测 肌肉出力、体现拮抗肌肉驱动、反算肌肉激活等 方面的优势,能够体现出更丰富的人体运动及肌 肉激活的信息。因此近些年来,很多学者提出了 使用肌电信号求解关节力矩的方法。该方法主要 分为 4 个过程:1) 从肌电信号 (sEMG) 求解肌肉 激活 (Muscle activation);2) 根据神经肌肉骨骼模 型求解肌肉力;3) 求解关节力臂;4) 参数辨识。 现阶段所使用的模型例如 Zajac 在 1989 年提出的 模型[12] 或 Huxley 的更复杂的生物物理模型[13-14] , 又如 Zahalak 的模型 [15-16] (Zahalak,1986,2000 年) 是基于 Hill 的经典著作[17]。本文主要总结了近年 来使用肌电信号以及相关生理学模型对关节力矩 的求解方法,并阐述了利用神经肌肉骨骼模型对 关节力矩求解的基本原理及过程,给出了模型中 涉及的一些参数的生理学统计数据。又给出了以 求解关节划分的该研究的主要应用,最后总结了 这一求解方法目前所存在的问题和之后发展的方向。 1 基本原理 人体运动过程中,骨骼肌的收缩是由我们的 神经系统进行控制的,当我们的大脑产生的运动 指令经过脊柱中枢神经传递到骨骼肌时,骨骼肌 开始收缩,与此同时,骨骼肌会产生一定的动作 电位,该电位在皮肤表面表现即为肌电信号。 我们将通过表面电极获取的肌电信号进行一 定的处理。之后利用神经激活模型求解神经激 活 u(t)。将 u(t) 代入到肌肉激活模型来求解肌肉 受到神经信号后的肌肉激活程度 a(t),将其代入 神经肌肉骨骼模型进而来计算肌肉力和关节力矩 臂,进一步得到关节力矩 M,之后根据实际测量 关节力矩 Mc,对整体肌肉骨骼模型的参数进行优 化,最终得到准确的关节力矩。整个流程如图1所示。 神经激活 求解 EMG 肌肉激活求解 参数辨识 神经肌肉骨骼模型 Mc M 运动学参数 肌电信号 神经激活 a(t) u(t) R, F(t) 力矩臂, 肌肉力 图 1 关节力矩求解流程 Fig. 1 Joint moment solution 2 神经激活求解 从对于肌肉骨骼模型的叙述可知,肌电信号 是由神经信号刺激肌肉激活所产生的,因此肌电 信号可以用来衡量肌肉激活及神经激活。然而其 间的映射关系是高度非线性的,同时肌电信号的 幅度也受诸多因素影响[18] ,(例如放大器的增益、 所选用的电极类型、电极相对于肌肉运动点的位 置、肌肉与电极之间的组织关系等),所以很难直 接利用肌电信号精准的计算和预测肌肉激活以及 肌肉力。 为了从肌电信号中获取有效信息以求解关节 力矩,必须滤除噪声,量化神经及肌肉的激活程 度。为此,在求解肌肉激活和肌肉力之前,先要 对肌电信号进行预处理,再将预处理后的肌电信 号转化为神经激活 u(t)。预处理过程可以描述 为:1) 5~30 Hz 高通滤波:由于放大器的精度不足 或者电极相对肌肉发生串动会导致采集到的肌电 信号的平均值产生时变的漂移,而这部分信号并 不属于肌电信号,因此要消除这些由于采集误差 导致的直流偏移或低频噪声。2) 全波整流和归一 化 (除以最大自主收缩期间获得的峰值整流 EMG 值) 处理[19-20]。3) 低通滤波:肌肉的电信号的频率 成分超过了 100 Hz,但是肌肉力的频率要比这低 得多,因此为了使肌电信号和肌肉力量相关,滤除 高频成分是非常重要的[12, 18, 21]。4) 求解神经激 活:求取神经激活 u 的方法如下: u(t) = α×e ( t− d TE ) −β1 ×u(t−1)−β2 ×u(t−2) (1) α、β1、β2 TE 式中:u(t) 为第 t 个采样点的神经激活;e 为肌电 信号; 分别为神经激活系数;d 为时间延 迟; 为采样时间间隔。其中上述神经激活系数 满足: β1 = γ1 +γ2(|γ1| < 1;|γ2| < 1) (2) β2 = γ1 · γ2 (|γ1| < 1;|γ2| < 1) (3) α−β1 −β2 = 1 (4) 3 肌肉激活求解 从肌电信号得到神经激活后,便可以对肌肉 激活进行计算和估计。其具体过程为 { a(t) = d ln(cu(t)+1), 0 ⩽ u(t) < 0.3 a(t) = mu(t)+b, 0.3 ⩽ u(t) < 1 (5) 式中:u(t) 是神经激活;a(t) 是肌肉激活。肌肉激 活系数 c、d、m 和 b 可以根据曲线过渡点及导数 关系同时求解。一些学者又将进行了一定的化 简 [8, 22-23] : ·194· 智 能 系 统 学 报 第 15 卷