正在加载图片...
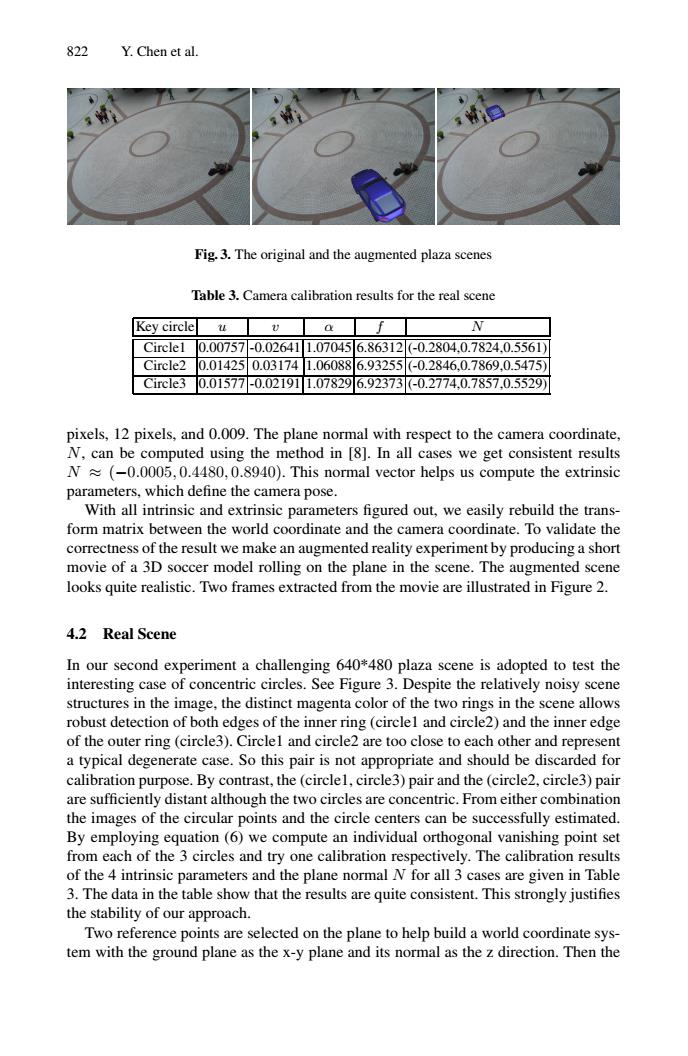
822 Y.Chen et al. Fig,3.The original and the augmented plaza scenes Table 3.Camera calibration results for the real scene Key circle N Ciee1D.0U757-0.026411.070N456.86312-0.2804.07824.0.5561 Circle2 D014250.031741.0608网693255(-0.2846,07869,0.54757 Co30T5T-02I]082网92-274.8350550 pixels,12 pixels,and 0.009.The plane normal with respect to the camera coordinate, N,can be computed using the method in [8].In all cases we get consistent results N(-0.0005,0.4480,0.8940).This normal vector helps us compute the extrinsic parameters,which define the camera pose. With all intrinsic and extrinsic parameters figured out,we easily rebuild the trans- form matrix between the world coordinate and the camera coordinate.To validate the correctness of the result we make an augmented reality experiment by producing a short movie of a 3D soccer model rolling on the plane in the scene.The augmented scene looks quite realistic.Two frames extracted from the movie are illustrated in Figure 2. 4.2 Real Scene In our second experiment a challenging 640*480 plaza scene is adopted to test the interesting case of concentric circles.See Figure 3.Despite the relatively noisy scene structures in the image,the distinct magenta color of the two rings in the scene allows robust detection of both edges of the inner ring (circlel and circle2)and the inner edge of the outer ring (circle3).Circlel and circle2 are too close to each other and represent a typical degenerate case.So this pair is not appropriate and should be disearded for calibration purpose.By contrast,the (circlel,circle3)pair and the (circle2,circle3)pair are sufficiently distant although the two circles are concentric.From either combination the images of the circular points and the circle centers can be successfully estimated. By employing equation (6)we compute an individual orthogonal vanishing point set from each of the 3 circles and try one calibration respectively.The calibration results of the 4 intrinsic parameters and the plane normal N for all 3 cases are given in Table 3.The data in the table show that the results are quite consistent.This strongly justifies the stability of our approach. Two reference points are selected on the plane to help build a world coordinate sys- tem with the ground plane as the x-y plane and its normal as the z direction.Then the 822 Y. Chen et al. Fig. 3. The original and the augmented plaza scenes Table 3. Camera calibration results for the real scene Key circle u v α f N Circle1 0.00757 -0.02641 1.07045 6.86312 (-0.2804,0.7824,0.5561) Circle2 0.01425 0.03174 1.06088 6.93255 (-0.2846,0.7869,0.5475) Circle3 0.01577 -0.02191 1.07829 6.92373 (-0.2774,0.7857,0.5529) pixels, 12 pixels, and 0.009. The plane normal with respect to the camera coordinate, N, can be computed using the method in [8]. In all cases we get consistent results N ≈ (−0.0005, 0.4480, 0.8940). This normal vector helps us compute the extrinsic parameters, which define the camera pose. With all intrinsic and extrinsic parameters figured out, we easily rebuild the transform matrix between the world coordinate and the camera coordinate. To validate the correctness of the result we make an augmented reality experiment by producing a short movie of a 3D soccer model rolling on the plane in the scene. The augmented scene looks quite realistic. Two frames extracted from the movie are illustrated in Figure 2. 4.2 Real Scene In our second experiment a challenging 640*480 plaza scene is adopted to test the interesting case of concentric circles. See Figure 3. Despite the relatively noisy scene structures in the image, the distinct magenta color of the two rings in the scene allows robust detection of both edges of the inner ring (circle1 and circle2) and the inner edge of the outer ring (circle3). Circle1 and circle2 are too close to each other and represent a typical degenerate case. So this pair is not appropriate and should be discarded for calibration purpose. By contrast, the (circle1, circle3) pair and the (circle2, circle3) pair are sufficiently distant although the two circles are concentric. From either combination the images of the circular points and the circle centers can be successfully estimated. By employing equation (6) we compute an individual orthogonal vanishing point set from each of the 3 circles and try one calibration respectively. The calibration results of the 4 intrinsic parameters and the plane normal N for all 3 cases are given in Table 3. The data in the table show that the results are quite consistent. This strongly justifies the stability of our approach. Two reference points are selected on the plane to help build a world coordinate system with the ground plane as the x-y plane and its normal as the z direction. Then the