正在加载图片...
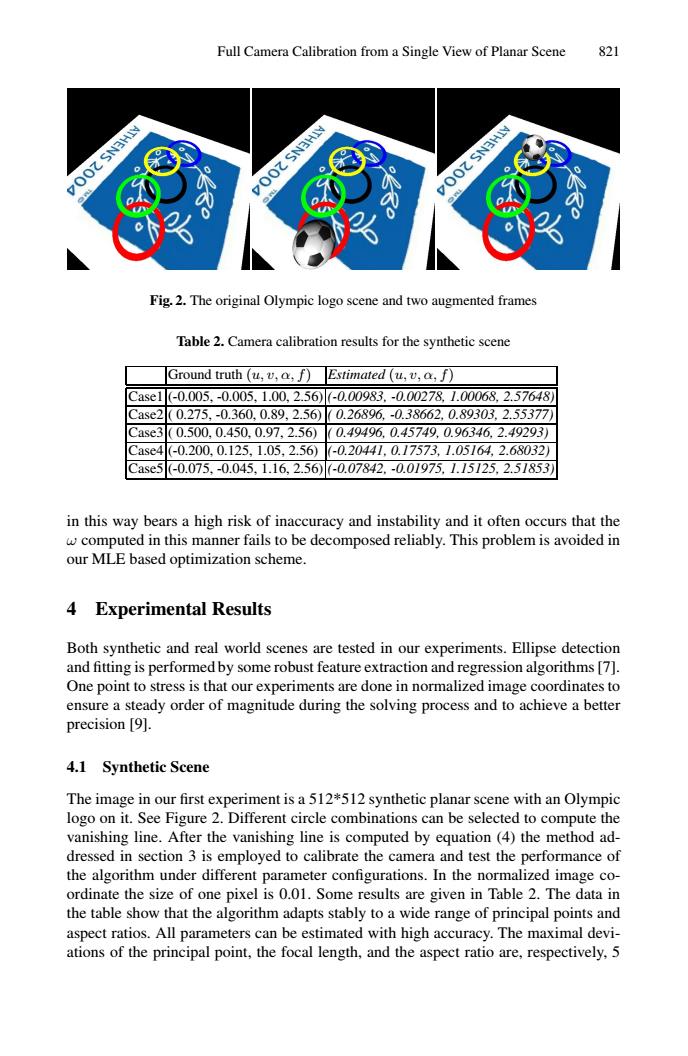
Full Camera Calibration from a Single View of Planar Scene 821 00S3 Fig.2.The original Olympic logo scepe and two augmented frames Table 2.Camera calibration results for the synthetic scene Ground truth (u,v,o f)Exrimared (u.,a,f) -0.005,0.005.1.002.56-0.0093+0002781.00063,2.5768 9.2.560269.-0.386620.897032.5577刀 1097.2.56 09496.04579.0963462.49293) 02 0.125,1.05,2.56) -0.20441.07573.1.0516M,2.680320 0.075,0.045,1.16,2.560-0.07842-0.01975,.15125,2.51853) in this way bears a high risk of inaccuracy and instability and it often occurs that the w computed in this manner fails to be decomposed reliahly.This problem is avoided in our MLE based optimization scheme. 4 Experimental Results Both synthetic and real world scenes are tested in our experiments.Ellipse detection and fitting is performed by some robust feature extraction and regression algorithms [7]. One point to stress is that our experiments are done in normalized image coordinates to ensure a steady order of magnitude during the solving process and to achieve a better precision [9]. 4.1 Synthetic Scene The image in our first experiment is a 512*512 synthetic planar scene with an Olympic logo on it.See Figure 2.Different circle combinations can be selected to compute the vanishing line.After the vanishing line is computed by cquation (4)the method ad- dressed in section 3 is employed to calibrate the camera and test the performance of the algorithm under different parameter configurations.In the normalized image co- ordinate the size of one pixel is 0.01.Some results are given in Table 2.The data in the table show that the algorithm adapts stably to a wide range of principal points and aspect ratios.All parameters can be estimated with high accuracy.The maximal devi- ations of the principal point,the focal length,and the aspect ratio are.respectively.5Full Camera Calibration from a Single View of Planar Scene 821 Fig. 2. The original Olympic logo scene and two augmented frames Table 2. Camera calibration results for the synthetic scene Ground truth (u, v, α, f) Estimated (u, v, α, f) Case1 (-0.005, -0.005, 1.00, 2.56) (-0.00983, -0.00278, 1.00068, 2.57648) Case2 ( 0.275, -0.360, 0.89, 2.56) ( 0.26896, -0.38662, 0.89303, 2.55377) Case3 ( 0.500, 0.450, 0.97, 2.56) ( 0.49496, 0.45749, 0.96346, 2.49293) Case4 (-0.200, 0.125, 1.05, 2.56) (-0.20441, 0.17573, 1.05164, 2.68032) Case5 (-0.075, -0.045, 1.16, 2.56) (-0.07842, -0.01975, 1.15125, 2.51853) in this way bears a high risk of inaccuracy and instability and it often occurs that the ω computed in this manner fails to be decomposed reliably. This problem is avoided in our MLE based optimization scheme. 4 Experimental Results Both synthetic and real world scenes are tested in our experiments. Ellipse detection and fitting is performed by some robust feature extraction and regression algorithms [7]. One point to stress is that our experiments are done in normalized image coordinates to ensure a steady order of magnitude during the solving process and to achieve a better precision [9]. 4.1 Synthetic Scene The image in our first experiment is a 512*512 synthetic planar scene with an Olympic logo on it. See Figure 2. Different circle combinations can be selected to compute the vanishing line. After the vanishing line is computed by equation (4) the method addressed in section 3 is employed to calibrate the camera and test the performance of the algorithm under different parameter configurations. In the normalized image coordinate the size of one pixel is 0.01. Some results are given in Table 2. The data in the table show that the algorithm adapts stably to a wide range of principal points and aspect ratios. All parameters can be estimated with high accuracy. The maximal deviations of the principal point, the focal length, and the aspect ratio are, respectively, 5