正在加载图片...
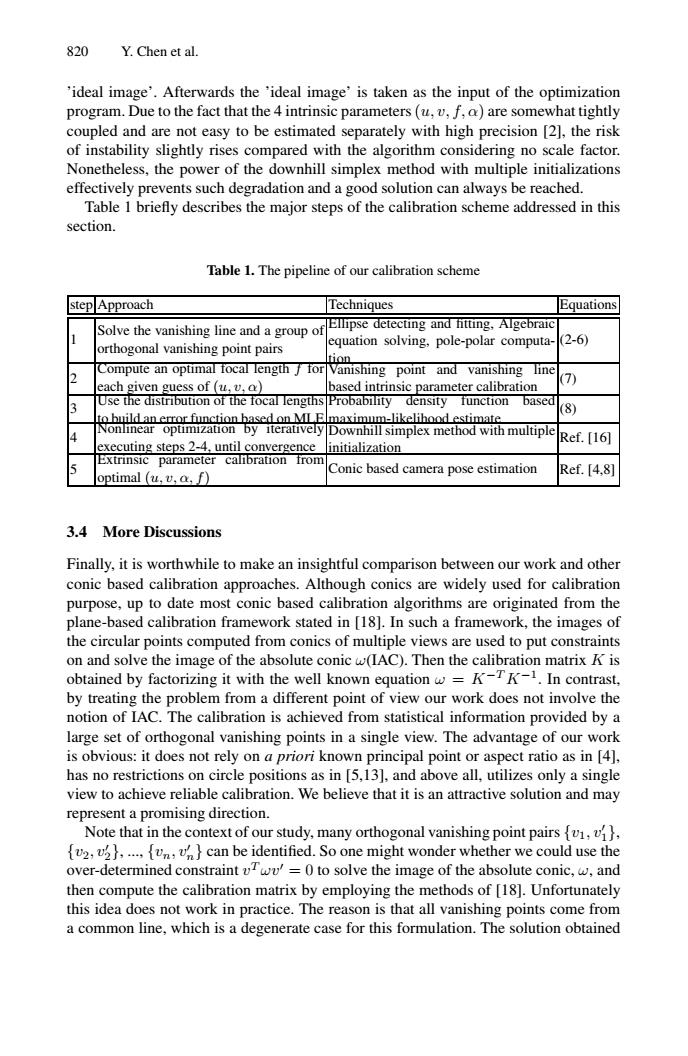
820 Y.Chen et al. 'ideal image'.Afterwards the 'ideal image'is taken as the input of the optimization program.Due to the fact that the 4 intrinsic parameters (v,f,o)are somewhat tightly coupled and are not easy to be estimated separately with high precision [2].the risk of instability slightly rises compared with the algorithm considering no scale factor. Nonetheless,the power of the downhill simplex method with multiple initializations effectively prevents such degradation and a good solution can always be reached. Table I briefly describes the major steps of the calibration scheme addressed in this section. Table 1.The pipeline of our calihrution scheme stepApproach Techniques Equations Solve the vanishing line and a group of Ellipse detecting and ntting.Algebraic arthogonal vanishing point pairs equation solving,pole-polar computa- 2-6) Compute an op风☒focal leng西了TC阿 2 Vanishing point and vanishing line each given guess of(u.,a】 based intrinsic parameter calibration 7) Use the distribution of the focal lengths Probability density function based tobuildan emor fupction hissed co MlEmsimmp likelibood estimate. 8 4 Nonlinear optimization by iteratively Downhill simplex method with multiple exccuting steps 2-4.until comergence Ref.[16] initialization Extrinsc parameter calibration Irom optimal (u.v.a.f) Conic based camera pose estimation Rer.4.8] 3.4 More Discussions Finally.it is worthwhile to make an insightful comparison between our work and other conic based calibration approaches.Although conics are widely used for calibration purpose,up to date most conic based calibration algorithms are originated from the plane-based calibration framework stated in [18].In such a framework,the images of the circular points computed from conics of multiple views are used to put constraints on and solve the image of the absolute conie w(IAC).Then the calibration matrix K is obtained by factorizing it with the well known equation=K-TK-1.In contrast. by treating the problem from a different point of view our work docs not involve the notion of IAC.The calibration is achieved from statistical information provided by a large set of orthogonal vanishing points in a single view.The advantage of our work is obvious:it does not rely on a priori known prineipal point or aspeet ratio as in [4], has no restrictions on cirele positions as in [5,13],and above all,utilizes only a single view to achieve reliable calibration.We believe that it is an attractive solution and may represent a promising direction. Note that in the context of our study.many orthogonal vanishing point pairs ..can be identificd.So one might wonder whether we could use the over-determined constraint v=0 to solve the image of the absolute conic.w,and then compute the calibration matrix by employing the methods of [18].Unfortunately this idea does not work in practice.The reason is that all vanishing points come from a common line,which is a degenerate case for this formulation.The solution obtained 820 Y. Chen et al. ’ideal image’. Afterwards the ’ideal image’ is taken as the input of the optimization program. Due to the fact that the 4 intrinsic parameters(u,v,f,α) are somewhat tightly coupled and are not easy to be estimated separately with high precision [2], the risk of instability slightly rises compared with the algorithm considering no scale factor. Nonetheless, the power of the downhill simplex method with multiple initializations effectively prevents such degradation and a good solution can always be reached. Table 1 briefly describes the major steps of the calibration scheme addressed in this section. Table 1. The pipeline of our calibration scheme step Approach Techniques Equations 1 Solve the vanishing line and a group of orthogonal vanishing point pairs Ellipse detecting and fitting, Algebraic equation solving, pole-polar computation (2-6) 2 Compute an optimal focal length f for each given guess of (u, v, α) Vanishing point and vanishing line based intrinsic parameter calibration (7) 3 Use the distribution of the focal lengths to build an error function based on MLE Probability density function based maximum-likelihood estimate (8) 4 Nonlinear optimization by iteratively executing steps 2-4, until convergence Downhill simplex method with multiple initialization Ref. [16] 5 Extrinsic parameter calibration from optimal (u, v, α, f) Conic based camera pose estimation Ref. [4,8] 3.4 More Discussions Finally, it is worthwhile to make an insightful comparison between our work and other conic based calibration approaches. Although conics are widely used for calibration purpose, up to date most conic based calibration algorithms are originated from the plane-based calibration framework stated in [18]. In such a framework, the images of the circular points computed from conics of multiple views are used to put constraints on and solve the image of the absolute conic ω(IAC). Then the calibration matrix K is obtained by factorizing it with the well known equation ω = K−T K−1. In contrast, by treating the problem from a different point of view our work does not involve the notion of IAC. The calibration is achieved from statistical information provided by a large set of orthogonal vanishing points in a single view. The advantage of our work is obvious: it does not rely on a priori known principal point or aspect ratio as in [4], has no restrictions on circle positions as in [5,13], and above all, utilizes only a single view to achieve reliable calibration. We believe that it is an attractive solution and may represent a promising direction. Note that in the context of our study, many orthogonal vanishing point pairs {v1, v 1}, {v2, v 2}, ..., {vn, v n} can be identified. So one might wonder whether we could use the over-determined constraint vT ωv = 0 to solve the image of the absolute conic, ω, and then compute the calibration matrix by employing the methods of [18]. Unfortunately this idea does not work in practice. The reason is that all vanishing points come from a common line, which is a degenerate case for this formulation. The solution obtained����