正在加载图片...
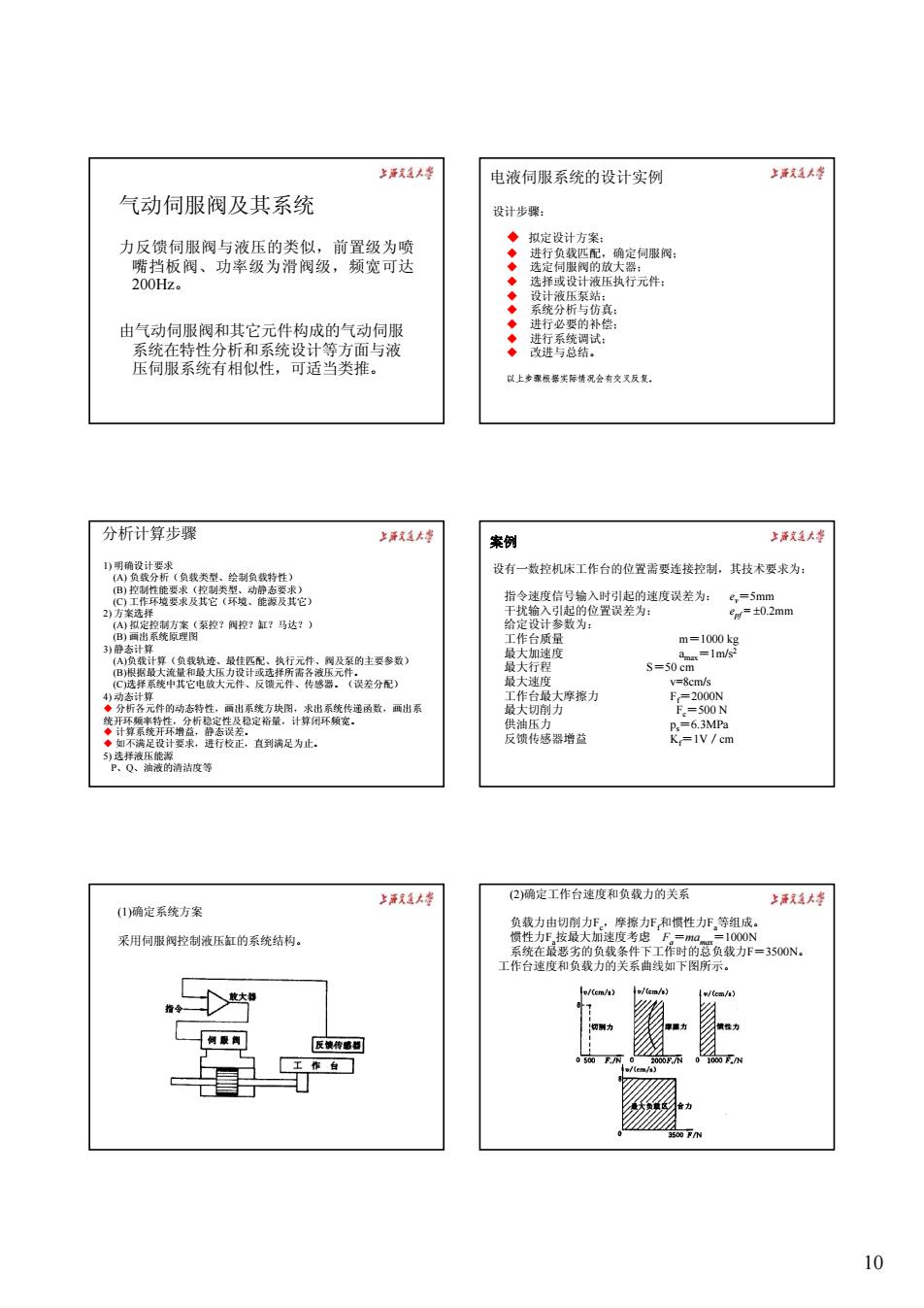
上泽成大坐 电液伺服系统的设计实例 上浙克1大当 气动伺服阀及其系统 设计步骤: ◆拟定设计方案: 力反馈伺服阀与液压的类似,前置级为喷 ◆ 进行负载匹配,确定伺服阀: 嘴挡板阀、功率级为滑阀级,频宽可达 ◆ 选定伺服阀的放大器: 200Hz。 ◆ 选择或设计液压执行元件: 设计液压泵站: 系统分析与仿真: 由气动伺服阀和其它元件构成的气动伺服 进行必要的补偿: ◆ 进行系统调试: 系统在特性分析和系统设计等方面与液 改进与总结。 压伺服系统有相似性,可适当类推。 以上岁聚根器实际情况会有交又反复, 分析计算步骤 )承文点人岁 案例 上活文1大举 )明确设计要求 设有一数控机床工作台的位置需要连接控制,其技术要求为: (4)负载分析(负载类型、绘制负线特性) (B)控制性能要求(控制类型、动静态要求) 〔C)工作环境要求及其它(环境、。能源及其它) 指令速度信号输入时引起的速度误差为: e,=5mm 2}方案选择 干扰输入引起的位置误差为: epy=t0.2mm (A)拟定控制方案(泵控?阀控?缸?马达?) 给定设计参数为: )画出系统原理图 工作台质量 m=1000kg 3)静态计算 最大加速度 (A)负载计算(负载轨迹、最佳匹配、执行元件、阀及泵的主要参数) mnax=1m/s (B)根据最大流量和最大压力设计或选择所需各波压元件。 最大行程 S=50cm (C)选释系统中其它电敏大元件、反馈元件、传感器。(误差分配) 最大速度 v=8cm/s )动态计算 工作台最大摩擦力 F=2000N ◆分析各元件的动态特性,画出系统方块图,求出系统传递函数,画出系 最大切削力 F.=500N 统开环频率特性,分析稳定性及稳定裕量,计算闭环類宽。 供油压力 ◆计算系统开环增益,静态误差。 ◆如不满足设计要求,进行校正,直到满足为止, 反馈传感器增益 -i7em 5)选择液压能源 P、Q、油液的清洁度等 上潘成1大孝 (2)确定工作台速度和负载力的关系 上活丝大举 (1)确定系统方案 负载力由切削力F,摩擦力F和惯性力F,等组成。 采用伺服阀控制液压缸的系统结构。 惯性力F按最大加速度考虑F,=ma =1000N 系统在最恶劣的负载条件下工作时的冠负载力F=35OON。 工作台速度和负载力的关系曲线如下图所示。 大 /(em/) (em/s 指 反铁传感司 工作台 1010 气动伺服阀及其系统 力反馈伺服阀与液压的类似,前置级为喷 嘴挡板阀、功率级为滑阀级,频宽可达 200Hz。 由气动伺服阀和其它元件构成的气动伺服 系统在特性分析和系统设计等方面与液 压伺服系统有相似性,可适当类推。 拟定设计方案; 进行负载匹配,确定伺服阀; 选定伺服阀的放大器; 选择或设计液压执行元件; 设计液压泵站; 系统分析与仿真; 进行必要的补偿; 进行系统调试; 改进与总结。 以上步骤根据实际情况会有交叉反复。 电液伺服系统的设计实例 设计步骤: 分析计算步骤 1) 明确设计要求 (A) 负载分析(负载类型、绘制负载特性) (B) 控制性能要求(控制类型、动静态要求) (C) 工作环境要求及其它(环境、能源及其它) 2) 方案选择 (A) 拟定控制方案(泵控?阀控?缸?马达?) (B) 画出系统原理图 3) 静态计算 (A)负载计算(负载轨迹、最佳匹配、执行元件、阀及泵的主要参数) (B)根据最大流量和最大压力设计或选择所需各液压元件。 (C)选择系统中其它电放大元件、反馈元件、传感器。(误差分配) 4) 动态计算 分析各元件的动态特性,画出系统方块图,求出系统传递函数,画出系 统开环频率特性,分析稳定性及稳定裕量,计算闭环频宽。 计算系统开环增益,静态误差。 如不满足设计要求,进行校正,直到满足为止。 5) 选择液压能源 P、Q、油液的清洁度等 设有一数控机床工作台的位置需要连接控制,其技术要求为: 指令速度信号输入时引起的速度误差为: ev=5mm 干扰输入引起的位置误差为: epf = ±0.2mm 给定设计参数为: 工作台质量 m=1000 kg 最大加速度 amax=1m/s2 最大行程 S=50 cm 最大速度 v=8cm/s 工作台最大摩擦力 Ff =2000N 最大切削力 Fc=500 N 供油压力 ps=6.3MPa 反馈传感器增益 Kf =1V/cm 案例 (1)确定系统方案 采用伺服阀控制液压缸的系统结构。 (2)确定工作台速度和负载力的关系 负载力由切削力Fc,摩擦力Ff 和惯性力Fa等组成。 惯性力Fa按最大加速度考虑 Fa=mamax=1000N 系统在最恶劣的负载条件下工作时的总负载力F=3500N。 工作台速度和负载力的关系曲线如下图所示