正在加载图片...
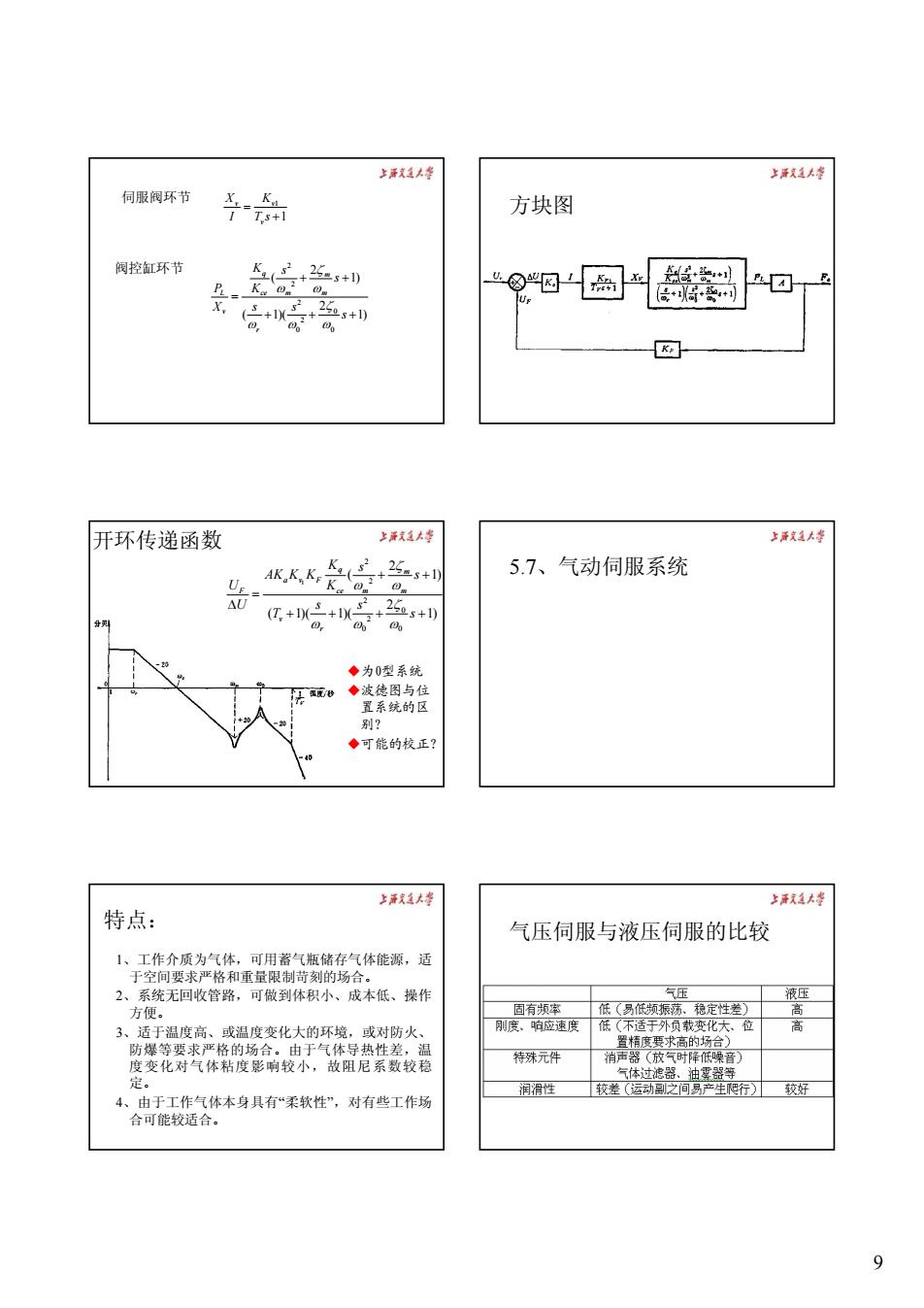
上泽克大竖 上播克1大当 伺服阀环节 K 方块图 阀控缸环节 (三+2s+ + Kao X. (++ +++ 5s+10 开环传递函数 上承发道大些 上活文1大举 K2三+25.+l KKK,⊙+g 5.7、气动伺服系统 △U 2250s+10 亿+后 ◆为0型系统 玩地 ◆波德图与位 置系统的区 别? ◆可能的校正? 40 上泽元1大孝 上活丝大修 特点: 气压伺服与液压伺服的比较 1、工作介质为气体,可用蓄气瓶储存气体能源,适 于空间要求严格和重量限制苛刻的场合。 2、系统无回收管路,可做到体积小、成本低、操作 气压 液压 方便。 固有频率 低(易低频振荡、稳定性差) 高 3、适于温度高、或温度变化大的环境,或对防火、 刚度、响应速度 低(不适于外负载变化大、位 置精度要求高的场合) 防爆等要求严格的场合。由于气体导热性差,温 度变化对气体粘度影响较小,故阻尼系数较稳 特殊元件 消声器(放气时降低噪音) 气体过滤器、油雾器等 定。 润滑性 较差(运动副之间易产生爬行)较好 4、由于工作气体本身具有“柔软性”,对有些工作场 合可能较适合。 99 1 1 v v v X K I T s = + 伺服阀环节 阀控缸环节 2 2 2 0 2 0 0 2 ( 1) 2 ( 1)( 1) q m L ce m m v r K s s P K X s s s ζ ω ω ζ ω ωω + + = + ++ 方块图 开环传递函数 1 2 2 2 0 2 0 0 2 ( 1) 2 ( 1)( 1)( 1) q m av F F ce m m v r K s AK K K s U K U s s T s ζ ω ω ζ ω ωω + + = Δ ++ ++ 为0型系统 波德图与位 置系统的区 别? 可能的校正? 5.7、气动伺服系统 特点: 1、工作介质为气体,可用蓄气瓶储存气体能源,适 于空间要求严格和重量限制苛刻的场合。 2、系统无回收管路,可做到体积小、成本低、操作 方便。 3、适于温度高、或温度变化大的环境,或对防火、 防爆等要求严格的场合。由于气体导热性差,温 度变化对气体粘度影响较小,故阻尼系数较稳 定。 4、由于工作气体本身具有“柔软性”,对有些工作场 合可能较适合。 气压伺服与液压伺服的比较