正在加载图片...
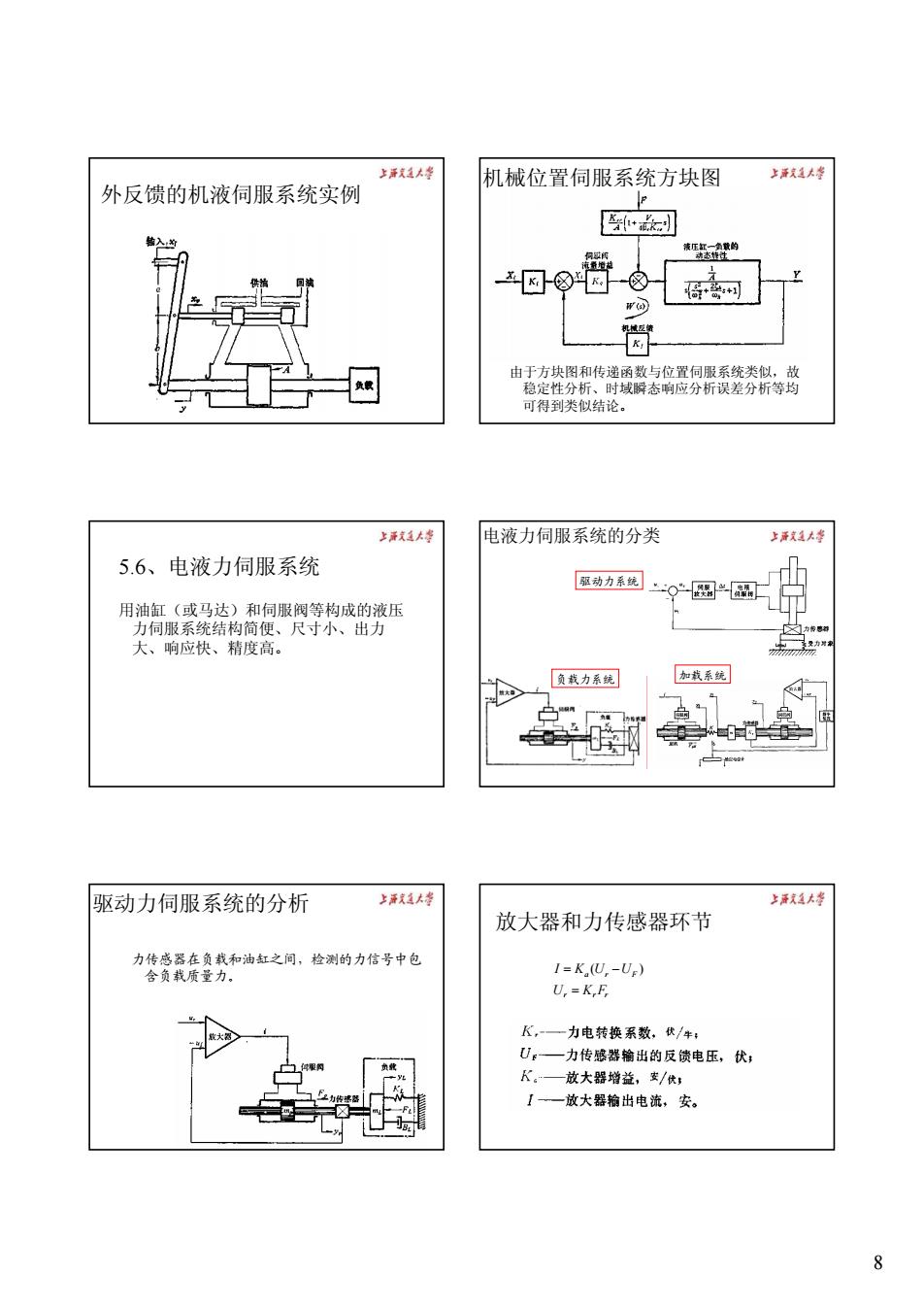
上泽克道大华 机械位置伺服系统方块图 上浙克1大当 外反馈的机液伺服系统实例 ·回 浅盘的 得可 形() 由于方块图和传递函数与位置伺服系统类似,故 稳定性分析、时域瞬态响应分析误差分析等均 可得到类似结论。 上道大步 电液力伺服系统的分类 泽克且人步 5.6、电液力伺服系统 驱动力系皖 山 0网 用油缸(或马达)和伺服阀等构成的液压 力伺服系统结构简便、尺寸小、出力 大、响应快、精度高。 负载力系统 加载系统 大 驱动力伺服系统的分析 上泽元1大孝 上活丝大举 放大器和力传感器环节 力传感器在负载和油缸之间,检测的力信号中包 含负载质量力。 I=K (U,-Ug) U,=K,F, K,一力电转换系数,伏/牛: U。一力传感器输出的反馈电压,伏, K。—放大器增益,安/代: 【一放大器输出电流,安。 88 外反馈的机液伺服系统实例 机械位置伺服系统方块图 由于方块图和传递函数与位置伺服系统类似,故 稳定性分析、时域瞬态响应分析误差分析等均 可得到类似结论。 5.6、电液力伺服系统 用油缸(或马达)和伺服阀等构成的液压 力伺服系统结构简便、尺寸小、出力 大、响应快、精度高。 电液力伺服系统的分类 驱动力系统 负载力系统 加载系统 驱动力伺服系统的分析 力传感器在负载和油缸之间,检测的力信号中包 含负载质量力。 放大器和力传感器环节 ( ) ar F r rr I KU U U KF = − =