正在加载图片...
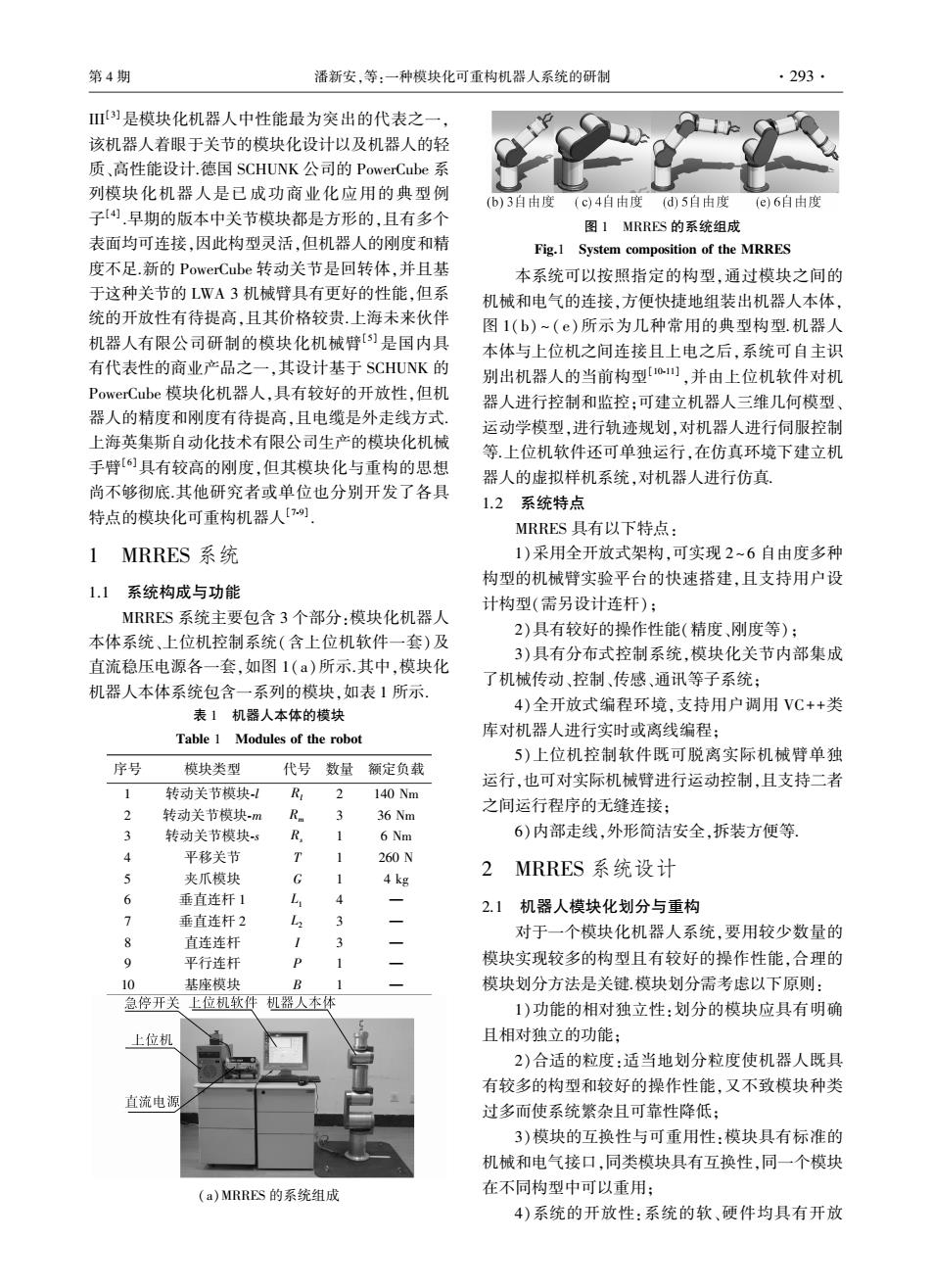
第4期 潘新安,等:一种模块化可重构机器人系统的研制 .293. Ⅲ)是模块化机器人中性能最为突出的代表之一, 该机器人着眼于关节的模块化设计以及机器人的轻 质、高性能设计.德国SCHUNK公司的PowerCube系 列模块化机器人是已成功商业化应用的典型例 (b)3自由度 (c)4自由度(d)5自由度(e)6自由度 子4,早期的版本中关节模块都是方形的,且有多个 图1 MRRES的系统组成 表面均可连接,因此构型灵活,但机器人的刚度和精 Fig.1 System composition of the MRRES 度不足.新的PowerCube转动关节是回转体,并且基 本系统可以按照指定的构型,通过模块之间的 于这种关节的LWA3机械臂具有更好的性能,但系 机械和电气的连接,方便快捷地组装出机器人本体, 统的开放性有待提高,且其价格较贵.上海未来伙伴 图1(b)~(e)所示为几种常用的典型构型.机器人 机器人有限公司研制的模块化机械臂[)是国内具 本体与上位机之间连接且上电之后,系统可自主识 有代表性的商业产品之一,其设计基于SCHUNK的 别出机器人的当前构型[0),并由上位机软件对机 PowerCube模块化机器人,具有较好的开放性,但机 器人进行控制和监控:可建立机器人三维几何模型、 器人的精度和刚度有待提高,且电缆是外走线方式。 运动学模型,进行轨迹规划,对机器人进行伺服控制 上海英集斯自动化技术有限公司生产的模块化机械 等.上位机软件还可单独运行,在仿真环境下建立机 手臂[具有较高的刚度,但其模块化与重构的思想 器人的虚拟样机系统,对机器人进行仿真 尚不够彻底其他研究者或单位也分别开发了各具 1.2系统特点 特点的模块化可重构机器人[) MRRES具有以下特点: 1 MRRES系统 1)采用全开放式架构,可实现2~6自由度多种 构型的机械臂实验平台的快速搭建,且支持用户设 1.1系统构成与功能 计构型(需另设计连杆); MRRES系统主要包含3个部分:模块化机器人 2)具有较好的操作性能(精度、刚度等): 本体系统、上位机控制系统(含上位机软件一套)及 3)具有分布式控制系统,模块化关节内部集成 直流稳压电源各一套,如图1(a)所示.其中,模块化 了机械传动、控制、传感、通讯等子系统: 机器人本体系统包含一系列的模块,如表1所示 4)全开放式编程环境,支持用户调用VC++类 表1机器人本体的模块 Table 1 Modules of the robot 库对机器人进行实时或离线编程: 5)上位机控制软件既可脱离实际机械臂单独 序号 模块类型 代号数量额定负载 运行,也可对实际机械臂进行运动控制,且支持二者 转动关节模块1 令 2 140Nm 2 转动关节模块-m R w 之间运行程序的无缝连接: 36 Nm 3 转动关节模块s R 1 6 Nm 6)内部走线,外形简洁安全,拆装方便等. 4 平移关节 T 1 260N 2 夹爪模块 G MRRES系统设计 1 4 kg 6 垂直连杆1 4 2.1机器人模块化划分与重构 7 垂直连杆2 L 3 对于一个模块化机器人系统,要用较少数量的 8 直连连杆 3 平行连杆 模块实现较多的构型且有较好的操作性能,合理的 10 基座模块 模块划分方法是关键模块划分需考虑以下原则: 急停开关 上位机软件 机器人本体 1)功能的相对独立性:划分的模块应具有明确 上位机 且相对独立的功能: 2)合适的粒度:适当地划分粒度使机器人既具 有较多的构型和较好的操作性能,又不致模块种类 直流电源 过多而使系统繁杂且可靠性降低: 3)模块的互换性与可重用性:模块具有标准的 机械和电气接口,同类模块具有互换性,同一个模块 (a)MRRES的系统组成 在不同构型中可以重用: 4)系统的开放性:系统的软、硬件均具有开放III [3]是模块化机器人中性能最为突出的代表之一, 该机器人着眼于关节的模块化设计以及机器人的轻 质、高性能设计.德国 SCHUNK 公司的 PowerCube 系 列模块化机器人是已成功商业化应用的典型例 子[4] .早期的版本中关节模块都是方形的,且有多个 表面均可连接,因此构型灵活,但机器人的刚度和精 度不足.新的 PowerCube 转动关节是回转体,并且基 于这种关节的 LWA 3 机械臂具有更好的性能,但系 统的开放性有待提高,且其价格较贵.上海未来伙伴 机器人有限公司研制的模块化机械臂[5] 是国内具 有代表性的商业产品之一,其设计基于 SCHUNK 的 PowerCube 模块化机器人,具有较好的开放性,但机 器人的精度和刚度有待提高,且电缆是外走线方式. 上海英集斯自动化技术有限公司生产的模块化机械 手臂[6]具有较高的刚度,但其模块化与重构的思想 尚不够彻底.其他研究者或单位也分别开发了各具 特点的模块化可重构机器人[7⁃9] . 1 MRRES 系统 1.1 系统构成与功能 MRRES 系统主要包含 3 个部分:模块化机器人 本体系统、上位机控制系统(含上位机软件一套)及 直流稳压电源各一套,如图 1(a)所示.其中,模块化 机器人本体系统包含一系列的模块,如表 1 所示. 表 1 机器人本体的模块 Table 1 Modules of the robot 序号 模块类型 代号 数量 额定负载 1 转动关节模块⁃l Rl 2 140 Nm 2 转动关节模块⁃m Rm 3 36 Nm 3 转动关节模块⁃s Rs 1 6 Nm 4 平移关节 T 1 260 N 5 夹爪模块 G 1 4 kg 6 垂直连杆 1 L1 4 — 7 垂直连杆 2 L2 3 — 8 直连连杆 I 3 — 9 平行连杆 P 1 — 10 基座模块 B 1 — (a)MRRES 的系统组成 图 1 MRRES 的系统组成 Fig.1 System composition of the MRRES 本系统可以按照指定的构型,通过模块之间的 机械和电气的连接,方便快捷地组装出机器人本体, 图 1(b) ~ ( e)所示为几种常用的典型构型.机器人 本体与上位机之间连接且上电之后,系统可自主识 别出机器人的当前构型[10⁃11] ,并由上位机软件对机 器人进行控制和监控;可建立机器人三维几何模型、 运动学模型,进行轨迹规划,对机器人进行伺服控制 等.上位机软件还可单独运行,在仿真环境下建立机 器人的虚拟样机系统,对机器人进行仿真. 1.2 系统特点 MRRES 具有以下特点: 1)采用全开放式架构,可实现 2 ~ 6 自由度多种 构型的机械臂实验平台的快速搭建,且支持用户设 计构型(需另设计连杆); 2)具有较好的操作性能(精度、刚度等); 3)具有分布式控制系统,模块化关节内部集成 了机械传动、控制、传感、通讯等子系统; 4)全开放式编程环境,支持用户调用 VC++类 库对机器人进行实时或离线编程; 5)上位机控制软件既可脱离实际机械臂单独 运行,也可对实际机械臂进行运动控制,且支持二者 之间运行程序的无缝连接; 6)内部走线,外形简洁安全,拆装方便等. 2 MRRES 系统设计 2.1 机器人模块化划分与重构 对于一个模块化机器人系统,要用较少数量的 模块实现较多的构型且有较好的操作性能,合理的 模块划分方法是关键.模块划分需考虑以下原则: 1)功能的相对独立性:划分的模块应具有明确 且相对独立的功能; 2)合适的粒度:适当地划分粒度使机器人既具 有较多的构型和较好的操作性能,又不致模块种类 过多而使系统繁杂且可靠性降低; 3)模块的互换性与可重用性:模块具有标准的 机械和电气接口,同类模块具有互换性,同一个模块 在不同构型中可以重用; 4)系统的开放性:系统的软、硬件均具有开放 第 4 期 潘新安,等:一种模块化可重构机器人系统的研制 ·293·