正在加载图片...
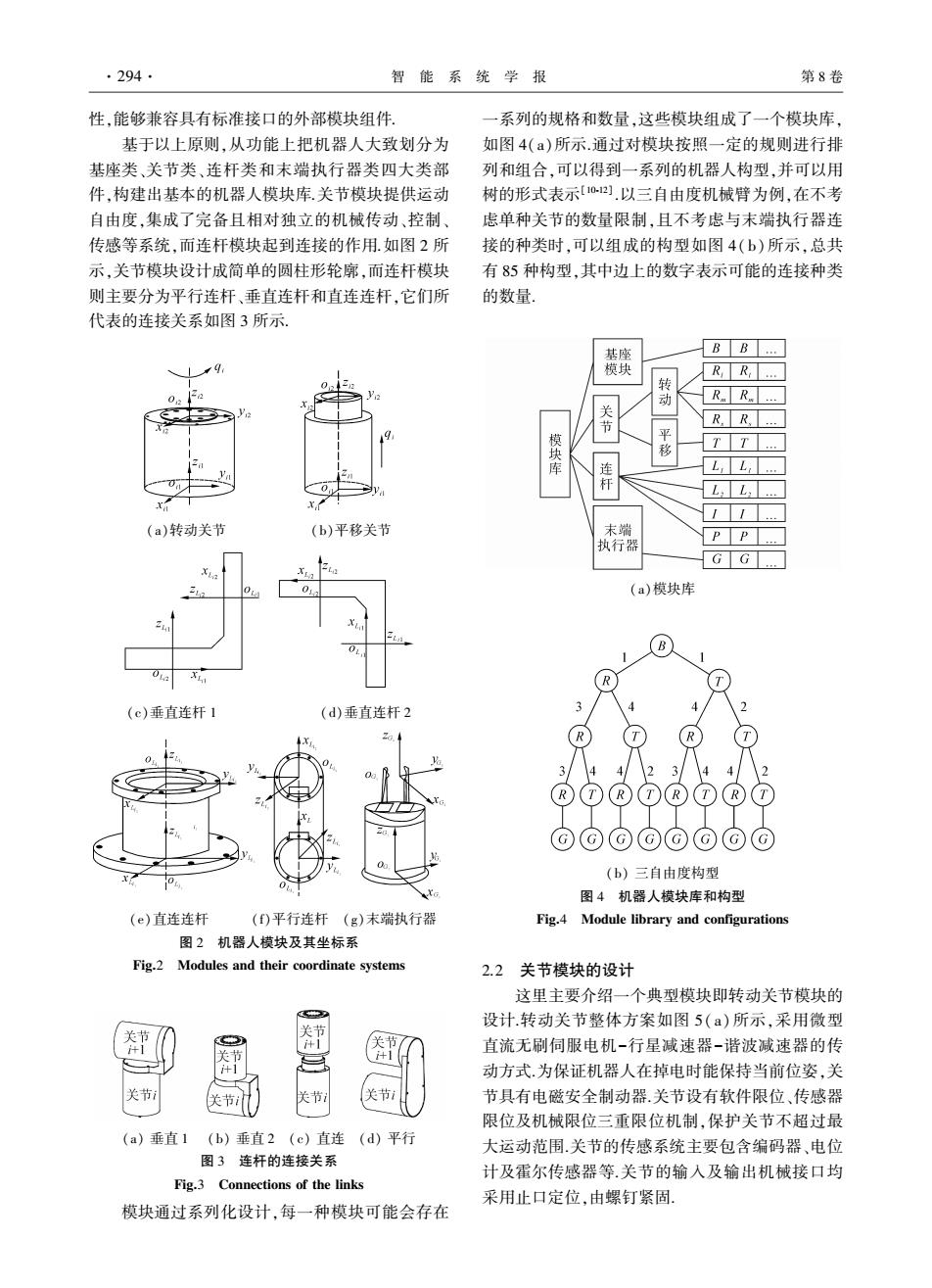
·294· 智能系统学报 第8卷 性,能够兼容具有标准接口的外部模块组件 一系列的规格和数量,这些模块组成了一个模块库 基于以上原则,从功能上把机器人大致划分为 如图4(a)所示.通过对模块按照一定的规则进行排 基座类、关节类、连杆类和末端执行器类四大类部 列和组合,可以得到一系列的机器人构型,并可以用 件,构建出基本的机器人模块库.关节模块提供运动 树的形式表示[o].以三自由度机械臂为例,在不考 自由度,集成了完备且相对独立的机械传动、控制、 虑单种关节的数量限制,且不考虑与末端执行器连 传感等系统,而连杆模块起到连接的作用如图2所 接的种类时,可以组成的构型如图4(b)所示,总共 示,关节模块设计成简单的圆柱形轮廓,而连杆模块 有85种构型,其中边上的数字表示可能的连接种类 则主要分为平行连杆、垂直连杆和直连连杆,它们所 的数量. 代表的连接关系如图3所示. 基座 BB.. 模块 RR 转 动 R R 节 R, 平 模块库 移 一0大 L,, (a)转动关节 (b)平移关节 末端 执行器 GG (a)模块库 R (c)垂直连杆1 (d)垂直连杆2 3 R 3/4 4/2 3/ ©©©©©©©© (b)三自由度构型 图4机器人模块库和构型 (e)直连连杆 ()平行连杆(g)末端执行器 Fig.4 Module library and configurations 图2机器人模块及其坐标系 Fig.2 Modules and their coordinate systems 2.2关节模块的设计 这里主要介绍一个典型模块即转动关节模块的 4 设计.转动关节整体方案如图5(a)所示,采用微型 节 直流无刷伺服电机-行星减速器-谐波减速器的传 动方式.为保证机器人在掉电时能保持当前位姿,关 关节 关节i 关节 关节 节具有电磁安全制动器.关节设有软件限位、传感器 限位及机械限位三重限位机制,保护关节不超过最 (a)垂直1(b)垂直2(c)直连(d)平行 大运动范围.关节的传感系统主要包含编码器、电位 图3连杆的连接关系 计及霍尔传感器等.关节的输入及输出机械接口均 Fig.3 Connections of the links 采用止口定位,由螺钉紧固. 模块通过系列化设计,每一种模块可能会存在性,能够兼容具有标准接口的外部模块组件. 基于以上原则,从功能上把机器人大致划分为 基座类、关节类、连杆类和末端执行器类四大类部 件,构建出基本的机器人模块库.关节模块提供运动 自由度,集成了完备且相对独立的机械传动、控制、 传感等系统,而连杆模块起到连接的作用.如图 2 所 示,关节模块设计成简单的圆柱形轮廓,而连杆模块 则主要分为平行连杆、垂直连杆和直连连杆,它们所 代表的连接关系如图 3 所示. (a)转动关节 (b)平移关节 (c)垂直连杆 1 (d)垂直连杆 2 (e)直连连杆 (f)平行连杆 (g)末端执行器 图 2 机器人模块及其坐标系 Fig.2 Modules and their coordinate systems (a) 垂直 1 (b) 垂直 2 (c) 直连 (d) 平行 图 3 连杆的连接关系 Fig.3 Connections of the links 模块通过系列化设计,每一种模块可能会存在 一系列的规格和数量,这些模块组成了一个模块库, 如图 4(a)所示.通过对模块按照一定的规则进行排 列和组合,可以得到一系列的机器人构型,并可以用 树的形式表示[10⁃12] .以三自由度机械臂为例,在不考 虑单种关节的数量限制,且不考虑与末端执行器连 接的种类时,可以组成的构型如图 4( b)所示,总共 有 85 种构型,其中边上的数字表示可能的连接种类 的数量. (a)模块库 (b) 三自由度构型 图 4 机器人模块库和构型 Fig.4 Module library and configurations 2.2 关节模块的设计 这里主要介绍一个典型模块即转动关节模块的 设计.转动关节整体方案如图 5( a)所示,采用微型 直流无刷伺服电机-行星减速器-谐波减速器的传 动方式.为保证机器人在掉电时能保持当前位姿,关 节具有电磁安全制动器.关节设有软件限位、传感器 限位及机械限位三重限位机制,保护关节不超过最 大运动范围.关节的传感系统主要包含编码器、电位 计及霍尔传感器等.关节的输入及输出机械接口均 采用止口定位,由螺钉紧固. ·294· 智 能 系 统 学 报 第 8 卷