正在加载图片...
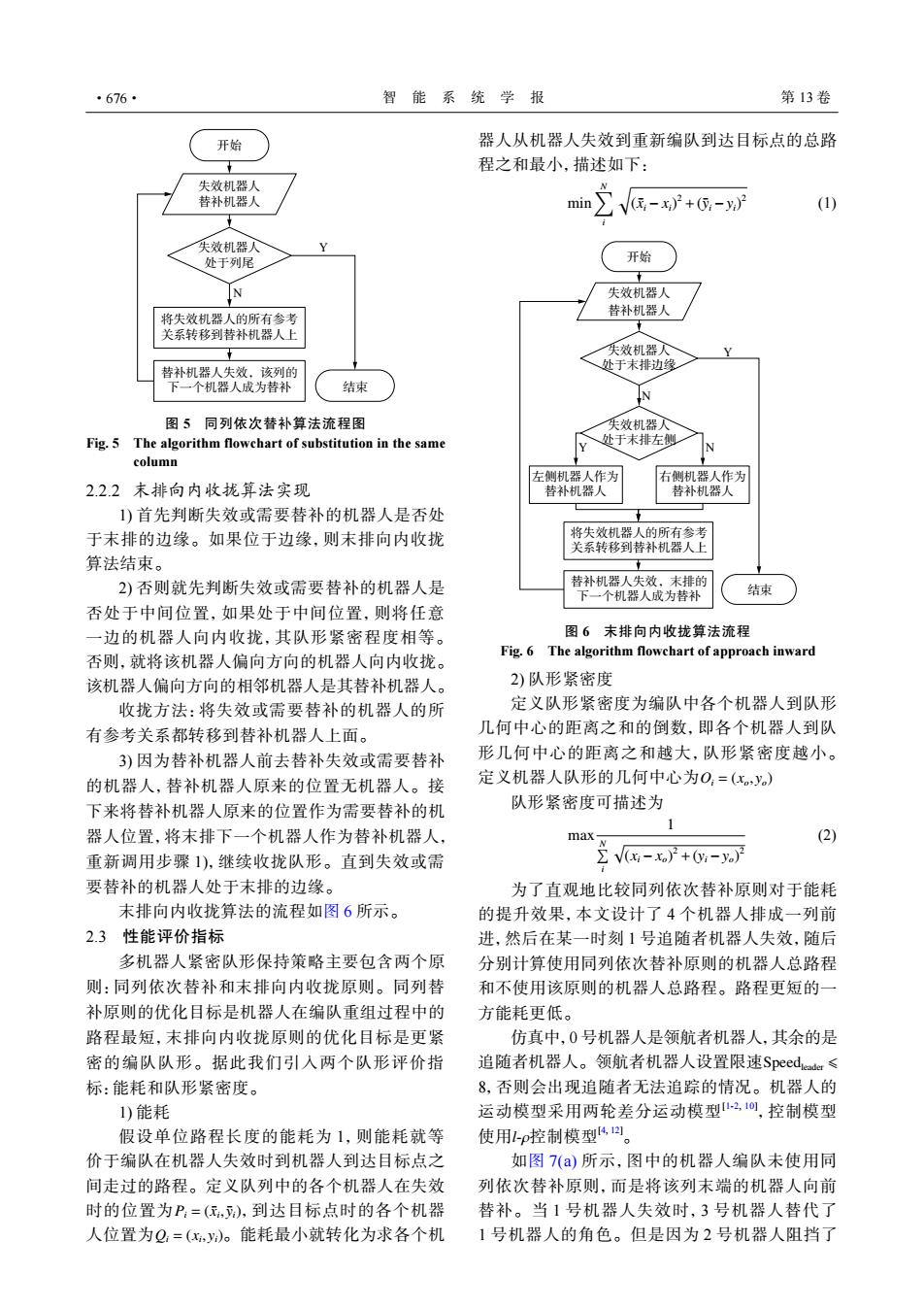
·676· 智能系统学报 第13卷 开始 器人从机器人失效到重新编队到达目标点的总路 程之和最小,描述如下: 失效机器人 替补机器人 min 元,-x)2+-y) (1) 失效机器人 处于列尾 开始 N 失效机器人 将失效机器人的所有参考 替补机器人 关系转移到替补机器人上 ★ 天效机器入 替补机器人失效,该列的 处于末排边缘 下一个机器人成为替补 结束 N 图5同列依次替补算法流程图 矢效机器八 Fig.5 The algorithm flowchart of substitution in the same 处于末排左侧 column 左侧机器人作为 右侧机器人作为 2.2.2末排向内收拢算法实现 替补机器人 替补机器人 1)首先判断失效或需要替补的机器人是否处 于末排的边缘。如果位于边缘,则末排向内收拢 将失效机器人的所有参考 关系转移到替补机器人上 算法结束。 2)否则就先判断失效或需要替补的机器人是 替补机器人失效,末排的 下一个机器人成为替补 结束 否处于中间位置,如果处于中间位置,则将任意 一边的机器人向内收拢,其队形紧密程度相等。 图6未排向内收拢算法流程 否则,就将该机器人偏向方向的机器人向内收拢。 Fig.6 The algorithm flowchart of approach inward 该机器人偏向方向的相邻机器人是其替补机器人。 2)队形紧密度 收拢方法:将失效或需要替补的机器人的所 定义队形紧密度为编队中各个机器人到队形 有参考关系都转移到替补机器人上面。 几何中心的距离之和的倒数,即各个机器人到队 3)因为替补机器人前去替补失效或需要替补 形几何中心的距离之和越大,队形紧密度越小。 的机器人,替补机器人原来的位置无机器人。接 定义机器人队形的几何中心为O,=(xy) 下来将替补机器人原来的位置作为需要替补的机 队形紧密度可描述为 1 器人位置,将末排下一个机器人作为替补机器人, max (2) 重新调用步骤1),继续收拢队形。直到失效或需 2vG-}+0- 要替补的机器人处于末排的边缘。 为了直观地比较同列依次替补原则对于能耗 末排向内收拢算法的流程如图6所示。 的提升效果,本文设计了4个机器人排成一列前 2.3性能评价指标 进,然后在某一时刻1号追随者机器人失效,随后 多机器人紧密队形保持策略主要包含两个原 分别计算使用同列依次替补原则的机器人总路程 则:同列依次替补和末排向内收拢原则。同列替 和不使用该原则的机器人总路程。路程更短的一 补原则的优化目标是机器人在编队重组过程中的 方能耗更低。 路程最短,末排向内收拢原则的优化目标是更紧 仿真中,0号机器人是领航者机器人,其余的是 密的编队队形。据此我们引入两个队形评价指 追随者机器人。领航者机器人设置限速Speedd≤ 标:能耗和队形紧密度。 8,否则会出现追随者无法追踪的情况。机器人的 1)能耗 运动模型采用两轮差分运动模型20,控制模型 假设单位路程长度的能耗为1,则能耗就等 使用l-p控制模型4四。 价于编队在机器人失效时到机器人到达目标点之 如图7(a)所示,图中的机器人编队未使用同 间走过的路程。定义队列中的各个机器人在失效 列依次替补原则,而是将该列末端的机器人向前 时的位置为P:=(优,),到达目标点时的各个机器 替补。当1号机器人失效时,3号机器人替代了 人位置为Q=(x,y)。能耗最小就转化为求各个机 1号机器人的角色。但是因为2号机器人阻挡了Y N 开始 失效机器人 替补机器人 失效机器人 处于列尾 结束 将失效机器人的所有参考 关系转移到替补机器人上 替补机器人失效,该列的 下一个机器人成为替补 图 5 同列依次替补算法流程图 Fig. 5 The algorithm flowchart of substitution in the same column 2.2.2 末排向内收拢算法实现 1) 首先判断失效或需要替补的机器人是否处 于末排的边缘。如果位于边缘,则末排向内收拢 算法结束。 2) 否则就先判断失效或需要替补的机器人是 否处于中间位置,如果处于中间位置,则将任意 一边的机器人向内收拢,其队形紧密程度相等。 否则,就将该机器人偏向方向的机器人向内收拢。 该机器人偏向方向的相邻机器人是其替补机器人。 收拢方法:将失效或需要替补的机器人的所 有参考关系都转移到替补机器人上面。 3) 因为替补机器人前去替补失效或需要替补 的机器人,替补机器人原来的位置无机器人。接 下来将替补机器人原来的位置作为需要替补的机 器人位置,将末排下一个机器人作为替补机器人, 重新调用步骤 1),继续收拢队形。直到失效或需 要替补的机器人处于末排的边缘。 末排向内收拢算法的流程如图 6 所示。 2.3 性能评价指标 多机器人紧密队形保持策略主要包含两个原 则:同列依次替补和末排向内收拢原则。同列替 补原则的优化目标是机器人在编队重组过程中的 路程最短,末排向内收拢原则的优化目标是更紧 密的编队队形。据此我们引入两个队形评价指 标:能耗和队形紧密度。 1) 能耗 Pi = ( ¯xi , y¯i) Qi = (xi , yi) 假设单位路程长度的能耗为 1,则能耗就等 价于编队在机器人失效时到机器人到达目标点之 间走过的路程。定义队列中的各个机器人在失效 时的位置为 ,到达目标点时的各个机器 人位置为 。能耗最小就转化为求各个机 器人从机器人失效到重新编队到达目标点的总路 程之和最小,描述如下: min∑N i √ ( ¯xi − xi) 2 +(¯yi −yi) 2 (1) Y Y N 开始 失效机器人 替补机器人 失效机器人 处于末排边缘 结束 将失效机器人的所有参考 关系转移到替补机器人上 替补机器人失效,末排的 下一个机器人成为替补 N 失效机器人 处于末排左侧 左侧机器人作为 替补机器人 右侧机器人作为 替补机器人 图 6 末排向内收拢算法流程 Fig. 6 The algorithm flowchart of approach inward 2) 队形紧密度 Oi = (xo, yo) 定义队形紧密度为编队中各个机器人到队形 几何中心的距离之和的倒数,即各个机器人到队 形几何中心的距离之和越大,队形紧密度越小。 定义机器人队形的几何中心为 队形紧密度可描述为 max 1 ∑N i √ (xi − xo) 2 +(yi −yo) 2 (2) 为了直观地比较同列依次替补原则对于能耗 的提升效果,本文设计了 4 个机器人排成一列前 进,然后在某一时刻 1 号追随者机器人失效,随后 分别计算使用同列依次替补原则的机器人总路程 和不使用该原则的机器人总路程。路程更短的一 方能耗更低。 Speedleader ⩽ l-ρ 仿真中,0 号机器人是领航者机器人,其余的是 追随者机器人。领航者机器人设置限速 8,否则会出现追随者无法追踪的情况。机器人的 运动模型采用两轮差分运动模型[1-2, 10] ,控制模型 使用 控制模型[4, 12]。 如图 7(a) 所示,图中的机器人编队未使用同 列依次替补原则,而是将该列末端的机器人向前 替补。当 1 号机器人失效时,3 号机器人替代了 1 号机器人的角色。但是因为 2 号机器人阻挡了 ·676· 智 能 系 统 学 报 第 13 卷