正在加载图片...
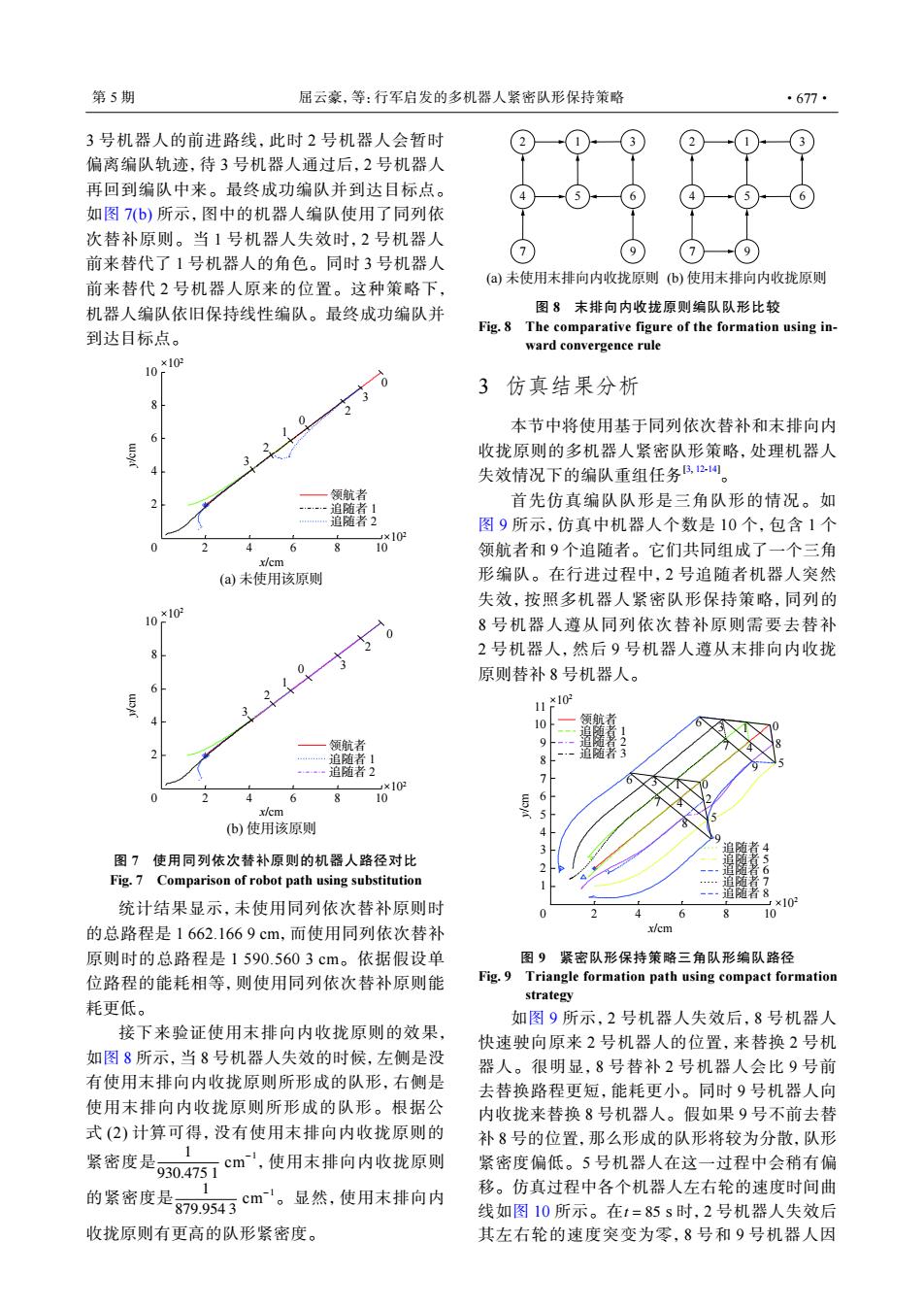
第5期 屈云豪,等:行军启发的多机器人紧密队形保持策略 ·677· 3号机器人的前进路线,此时2号机器人会暂时 偏离编队轨迹,待3号机器人通过后,2号机器人 再回到编队中来。最终成功编队并到达目标点。 如图7(b)所示,图中的机器人编队使用了同列依 次替补原则。当1号机器人失效时,2号机器人 7 前来替代了1号机器人的角色。同时3号机器人 前来替代2号机器人原来的位置。这种策略下, (@)未使用末排向内收拢原则(b)使用末排向内收拢原则 机器人编队依旧保持线性编队。最终成功编队并 图8未排向内收拢原则编队队形比较 Fig.8 The comparative figure of the formation using in- 到达目标点。 ward convergence rule 10*1 3仿真结果分析 8 0 本节中将使用基于同列依次替补和末排向内 2 3 收拢原则的多机器人紧密队形策略,处理机器人 失效情况下的编队重组任务B2 领航者 ----追随者1 首先仿真编队队形是三角队形的情况。如 追随者2 图9所示,仿真中机器人个数是10个,包含1个 102 4 6 10 领航者和9个追随者。它们共同组成了一个三角 x/cm (a)未使用该原则 形编队。在行进过程中,2号追随者机器人突然 失效,按照多机器人紧密队形保持策略,同列的 10*103 8号机器人遵从同列依次替补原则需要去替补 0 2号机器人,然后9号机器人遵从末排向内收拢 0 原则替补8号机器人。 ×102 11 领航者 追随者1 追随者2 10 4 6 10 6 xcm (b)使用该原则 自随者4 图7使用同列依次替补原则的机器人路径对比 Fig.7 Comparison of robot path using substitution 一-·追随者8 统计结果显示,未使用同列依次替补原则时 102 8 10 的总路程是1662.1669cm,而使用同列依次替补 x/cm 原则时的总路程是1590.5603cm。依据假设单 图9紧密队形保持策略三角队形编队路径 位路程的能耗相等,则使用同列依次替补原则能 Fig.9 Triangle formation path using compact formation strategy 耗更低。 如图9所示,2号机器人失效后,8号机器人 接下来验证使用末排向内收拢原则的效果, 快速驶向原来2号机器人的位置,来替换2号机 如图8所示,当8号机器人失效的时候,左侧是没 器人。很明显,8号替补2号机器人会比9号前 有使用末排向内收拢原则所形成的队形,右侧是 去替换路程更短,能耗更小。同时9号机器人向 使用末排向内收拢原则所形成的队形。根据公 内收拢来替换8号机器人。假如果9号不前去替 式(2)计算可得,没有使用末排向内收拢原则的 补8号的位置,那么形成的队形将较为分散,队形 紧密度 是0.475cm,使用末排向内收拢原则 紧密度偏低。5号机器人在这一过程中会稍有偏 移。仿真过程中各个机器人左右轮的速度时间曲 的紧密度是879.9543cm。显然,使用末排向内 线如图10所示。在t=85s时,2号机器人失效后 收拢原则有更高的队形紧密度。 其左右轮的速度突变为零,8号和9号机器人因3 号机器人的前进路线,此时 2 号机器人会暂时 偏离编队轨迹,待 3 号机器人通过后,2 号机器人 再回到编队中来。最终成功编队并到达目标点。 如图 7(b) 所示,图中的机器人编队使用了同列依 次替补原则。当 1 号机器人失效时,2 号机器人 前来替代了 1 号机器人的角色。同时 3 号机器人 前来替代 2 号机器人原来的位置。这种策略下, 机器人编队依旧保持线性编队。最终成功编队并 到达目标点。 领航者 追随者 1 追随者 2 0 3 2 0 1 2 3 0 2 4 6 8 10 2 4 6 8 10 x/cm y/cm (a) 未使用该原则 领航者 追随者 1 追随者 2 0 1 2 3 2 3 0 0 2 4 6 8 10 2 4 6 8 10 x/cm y/cm (b) 使用该原则 ×102 ×102 ×102 ×102 图 7 使用同列依次替补原则的机器人路径对比 Fig. 7 Comparison of robot path using substitution 统计结果显示,未使用同列依次替补原则时 的总路程是 1 662.166 9 cm,而使用同列依次替补 原则时的总路程是 1 590.560 3 cm。依据假设单 位路程的能耗相等,则使用同列依次替补原则能 耗更低。 1 930.475 1 1 879.954 3 接下来验证使用末排向内收拢原则的效果, 如图 8 所示,当 8 号机器人失效的时候,左侧是没 有使用末排向内收拢原则所形成的队形,右侧是 使用末排向内收拢原则所形成的队形。根据公 式 (2) 计算可得,没有使用末排向内收拢原则的 紧密度是 cm – 1,使用末排向内收拢原则 的紧密度是 cm – 1。显然,使用末排向内 收拢原则有更高的队形紧密度。 2 1 3 4 5 6 7 9 2 1 3 4 5 9 6 7 (a) 未使用末排向内收拢原则 (b) 使用末排向内收拢原则 图 8 末排向内收拢原则编队队形比较 Fig. 8 The comparative figure of the formation using inward convergence rule 3 仿真结果分析 本节中将使用基于同列依次替补和末排向内 收拢原则的多机器人紧密队形策略,处理机器人 失效情况下的编队重组任务[3, 12-14]。 首先仿真编队队形是三角队形的情况。如 图 9 所示,仿真中机器人个数是 10 个,包含 1 个 领航者和 9 个追随者。它们共同组成了一个三角 形编队。在行进过程中,2 号追随者机器人突然 失效,按照多机器人紧密队形保持策略,同列的 8 号机器人遵从同列依次替补原则需要去替补 2 号机器人,然后 9 号机器人遵从末排向内收拢 原则替补 8 号机器人。 0 2 4 6 8 10 1 2 3 4 5 6 7 8 9 10 11 y/cm 领航者 追随者 1 追随者 2 追随者 3 追随者 4 追随者 5 追随者 6 追随者 7 追随者 8 1 2 3 4 5 6 7 8 9 0 0 6 7 5 4 9 8 3 1 x/cm ×102 ×102 图 9 紧密队形保持策略三角队形编队路径 Fig. 9 Triangle formation path using compact formation strategy t = 85 如图 9 所示,2 号机器人失效后,8 号机器人 快速驶向原来 2 号机器人的位置,来替换 2 号机 器人。很明显,8 号替补 2 号机器人会比 9 号前 去替换路程更短,能耗更小。同时 9 号机器人向 内收拢来替换 8 号机器人。假如果 9 号不前去替 补 8 号的位置,那么形成的队形将较为分散,队形 紧密度偏低。5 号机器人在这一过程中会稍有偏 移。仿真过程中各个机器人左右轮的速度时间曲 线如图 10 所示。在 s 时,2 号机器人失效后 其左右轮的速度突变为零,8 号和 9 号机器人因 第 5 期 屈云豪,等:行军启发的多机器人紧密队形保持策略 ·677·