正在加载图片...
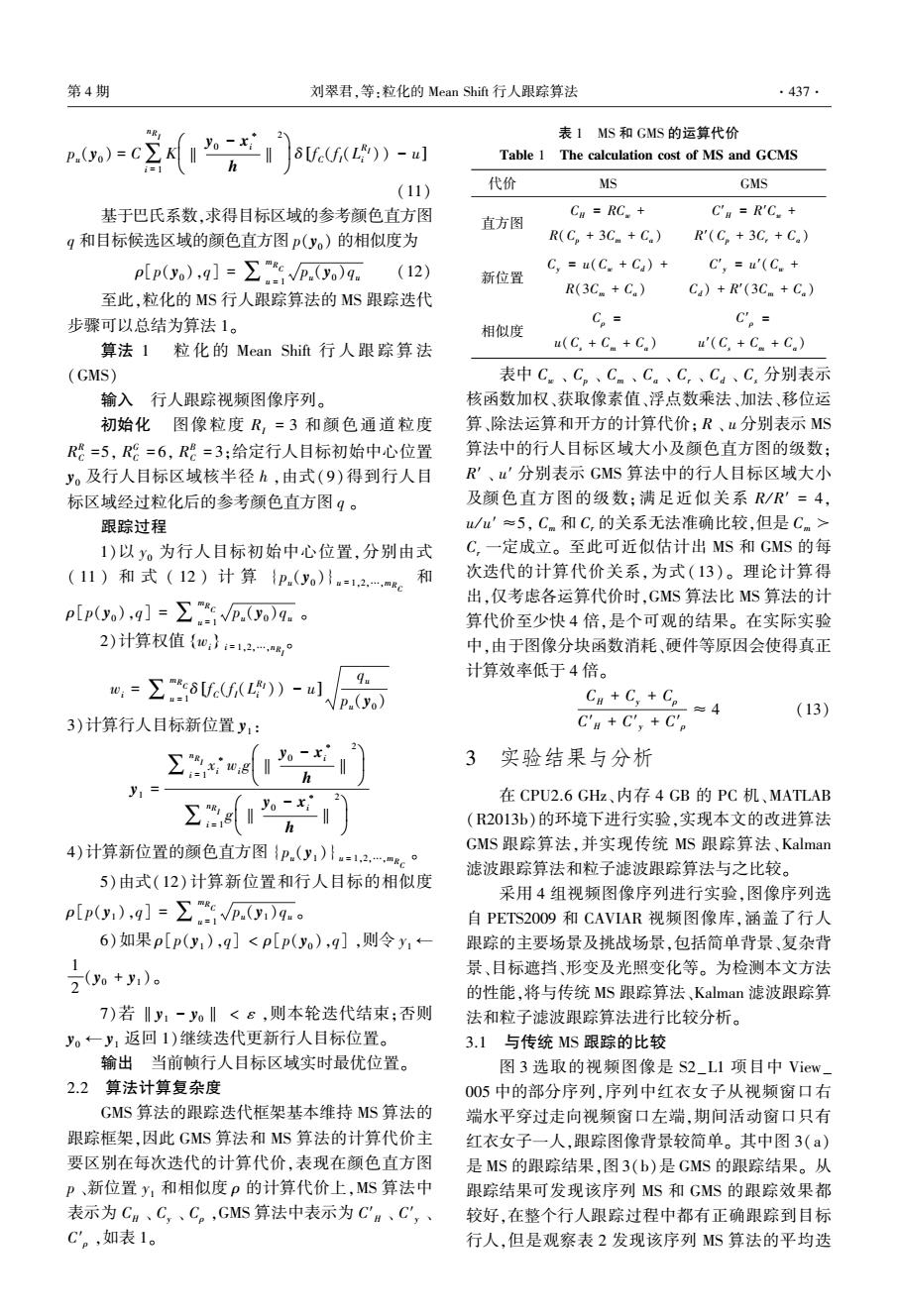
第4期 刘翠君,等:粒化的Mean Shift行人跟踪算法 .437. 表1MS和GMS的运算代价 Table 1 The calculation cost of MS and GCMS (11) 代价 MS GMS 基于巴氏系数,求得目标区域的参考颜色直方图 Cu RC+ C'H=R'C.+ 直方图 q和目标候选区域的颜色直方图p(y。)的相似度为 R(C。+3Cm+C.)R'(C。+3C,+C。) plp(),9]=∑p.o)9 (12) C,=u(C.+C)+ C',=u'(Cm+ 新位置 至此,粒化的MS行人跟踪算法的MS跟踪迭代 R(3C+C.) Ca)+R'(3C+C.) 步骤可以总结为算法1。 C。= 相似度 C'。= 算法1粒化的Mean Shift行人跟踪算法 u(C,+C.+C.) u'(C,+C.+C.) (GMS) 表中C。、C。、Cm、C。、C,、Cd、C,分别表示 输入行人跟踪视频图像序列。 核函数加权、获取像素值、浮点数乘法、加法、移位运 初始化图像粒度R,=3和颜色通道粒度 算、除法运算和开方的计算代价:R、u分别表示MS R=5,R=6,R=3;给定行人目标初始中心位置 算法中的行人目标区域大小及颜色直方图的级数; y。及行人目标区域核半径h,由式(9)得到行人目 R'、u'分别表示GMS算法中的行人目标区域大小 标区域经过粒化后的参考颜色直方图q。 及颜色直方图的级数;满足近似关系R/R'=4, 跟踪过程 u/u'≈5,Cm和C,的关系无法准确比较,但是Cm> 1)以y。为行人目标初始中心位置,分别由式 C,一定成立。至此可近似估计出MS和GMS的每 (11)和式(12)计算{p.(o)=12“,。 和 次迭代的计算代价关系,为式(13)。理论计算得 出,仅考虑各运算代价时,GMS算法比MS算法的计 p[p)9]=∑p.09.。 算代价至少快4倍,是个可观的结果。在实际实验 2)计算权值{w:}=12,…,R,0 中,由于图像分块函数消耗、硬件等原因会使得真正 计算效率低于4倍。 o,=∑δef(L)-u, qu P.(Yo) Cm+C,+Cp≈4 (13) 3)计算行人目标新位置y1: C'H+C',+C。 ∑x,1 3实验结果与分析 在CPU2.6GHz、内存4GB的PC机、MATLAB (R2013b)的环境下进行实验,实现本文的改进算法 4)计算新位置的颜色直方图{P.(少)=12.…,m。 GMS跟踪算法,并实现传统MS跟踪算法、Kalman 滤波跟踪算法和粒子滤波跟踪算法与之比较。 5)由式(12)计算新位置和行人目标的相似度 采用4组视频图像序列进行实验,图像序列选 p[p0),9]=∑9.。 自PETS2009和CAVIAR视频图像库,涵盖了行人 6)如果p[p(y),q]<p[p(ya),q],则令y1←- 跟踪的主要场景及挑战场景,包括简单背景、复杂背 2(+y)。 景、目标遮挡、形变及光照变化等。为检测本文方法 的性能,将与传统MS跟踪算法、Kalman滤波跟踪算 7)若‖y1-yo‖<8,则本轮迭代结束;否则 法和粒子滤波跟踪算法进行比较分析。 y。←一y,返回1)继续迭代更新行人目标位置。 3.1与传统MS跟踪的比较 输出当前帧行人目标区域实时最优位置。 图3选取的视频图像是S2_Ll项目中View- 2.2算法计算复杂度 005中的部分序列,序列中红衣女子从视频窗口右 GMS算法的跟踪迭代框架基本维持MS算法的 端水平穿过走向视频窗口左端,期间活动窗口只有 跟踪框架,因此GMS算法和MS算法的计算代价主 红衣女子一人,跟踪图像背景较简单。其中图3(a) 要区别在每次迭代的计算代价,表现在颜色直方图 是MS的跟踪结果,图3(b)是GMS的跟踪结果。从 p、新位置y,和相似度p的计算代价上,MS算法中 跟踪结果可发现该序列MS和GMS的跟踪效果都 表示为Cg、C,、C。,GMS算法中表示为Cg、C',、 较好,在整个行人跟踪过程中都有正确跟踪到目标 C'。,如表1。 行人,但是观察表2发现该序列MS算法的平均迭pu(y0 ) = C∑ nR I i = 1 K ‖ y0 - x ∗ i h ‖ 2 æ è ç ö ø ÷ δ fC(f I(L RI [ i )) - u] (11) 基于巴氏系数,求得目标区域的参考颜色直方图 q 和目标候选区域的颜色直方图 p(y0 ) 的相似度为 ρ[p(y0 ),q] = ∑ mR C u = 1 pu(y0 )qu (12) 至此,粒化的 MS 行人跟踪算法的 MS 跟踪迭代 步骤可以总结为算法 1。 算法 1 粒 化 的 Mean Shift 行 人 跟 踪 算 法 (GMS) 输入 行人跟踪视频图像序列。 初始化 图像粒度 RI = 3 和颜色通道粒度 R R C =5, R G C = 6, R B C = 3;给定行人目标初始中心位置 y0 及行人目标区域核半径 h ,由式(9)得到行人目 标区域经过粒化后的参考颜色直方图 q 。 跟踪过程 1)以 y0 为行人目标初始中心位置,分别由式 ( 11 ) 和 式 ( 12 ) 计 算 {pu(y0 )}u = 1,2,…,mR C 和 ρ[p(y0 ),q] = ∑ mR C u = 1 pu(y0 )qu 。 2)计算权值 wi { } i = 1,2,…,nR I 。 wi = ∑ mR C u = 1 δ fC(f I(L RI [ i )) - u] qu pu(y0 ) 3)计算行人目标新位置 y1 : y1 = ∑ nR I i = 1 x ∗ i wig ‖ y0 - x ∗ i h ‖ 2 æ è ç ö ø ÷ ∑ nR I i = 1 g ‖ y0 - x ∗ i h ‖ 2 æ è ç ö ø ÷ 4)计算新位置的颜色直方图 {pu(y1 )}u = 1,2,…,mR C 。 5)由式(12)计算新位置和行人目标的相似度 ρ[p(y1 ),q] = ∑ mR C u = 1 pu(y1 )qu 。 6)如果 ρ[p(y1 ),q] < ρ[p(y0 ),q] ,则令 y1 ← 1 2 (y0 + y1 )。 7)若 ‖y1 - y0‖ < ε ,则本轮迭代结束;否则 y0 ← y1 返回 1)继续迭代更新行人目标位置。 输出 当前帧行人目标区域实时最优位置。 2.2 算法计算复杂度 GMS 算法的跟踪迭代框架基本维持 MS 算法的 跟踪框架,因此 GMS 算法和 MS 算法的计算代价主 要区别在每次迭代的计算代价,表现在颜色直方图 p 、新位置 y1 和相似度 ρ 的计算代价上,MS 算法中 表示为 CH 、 Cy 、 Cρ ,GMS 算法中表示为 C′H 、 C′y 、 C′ρ ,如表 1。 表 1 MS 和 GMS 的运算代价 Table 1 The calculation cost of MS and GCMS 代价 MS GMS 直方图 CH = RCw + R(Cp + 3Cm + Ca ) C′H = R′Cw + R′(Cp + 3Cr + Ca ) 新位置 Cy = u(Cw + Cd ) + R(3Cm + Ca ) C′y = u′(Cw + Cd ) + R′(3Cm + Ca ) 相似度 Cρ = u(Cs + Cm + Ca ) C′ρ = u′(Cs + Cm + Ca ) 表中 Cw 、 Cp 、 Cm 、 Ca 、 Cr 、 Cd 、 Cs 分别表示 核函数加权、获取像素值、浮点数乘法、加法、移位运 算、除法运算和开方的计算代价; R 、 u 分别表示 MS 算法中的行人目标区域大小及颜色直方图的级数; R′ 、 u′ 分别表示 GMS 算法中的行人目标区域大小 及颜色直方图的级数;满足近似关系 R / R′ = 4, u / u′ ≈5, Cm 和 Cr 的关系无法准确比较,但是 Cm ≻ Cr 一定成立。 至此可近似估计出 MS 和 GMS 的每 次迭代的计算代价关系,为式( 13)。 理论计算得 出,仅考虑各运算代价时,GMS 算法比 MS 算法的计 算代价至少快 4 倍,是个可观的结果。 在实际实验 中,由于图像分块函数消耗、硬件等原因会使得真正 计算效率低于 4 倍。 CH + Cy + Cρ C′H + C′y + C′ρ ≈ 4 (13) 3 实验结果与分析 在 CPU2.6 GHz、内存 4 GB 的 PC 机、MATLAB (R2013b)的环境下进行实验,实现本文的改进算法 GMS 跟踪算法,并实现传统 MS 跟踪算法、Kalman 滤波跟踪算法和粒子滤波跟踪算法与之比较。 采用 4 组视频图像序列进行实验,图像序列选 自 PETS2009 和 CAVIAR 视频图像库,涵盖了行人 跟踪的主要场景及挑战场景,包括简单背景、复杂背 景、目标遮挡、形变及光照变化等。 为检测本文方法 的性能,将与传统 MS 跟踪算法、Kalman 滤波跟踪算 法和粒子滤波跟踪算法进行比较分析。 3.1 与传统 MS 跟踪的比较 图 3 选取的视频图像是 S2_L1 项目中 View_ 005 中的部分序列,序列中红衣女子从视频窗口右 端水平穿过走向视频窗口左端,期间活动窗口只有 红衣女子一人,跟踪图像背景较简单。 其中图 3(a) 是 MS 的跟踪结果,图 3(b)是 GMS 的跟踪结果。 从 跟踪结果可发现该序列 MS 和 GMS 的跟踪效果都 较好,在整个行人跟踪过程中都有正确跟踪到目标 行人,但是观察表 2 发现该序列 MS 算法的平均迭 第 4 期 刘翠君,等:粒化的 Mean Shift 行人跟踪算法 ·437·