正在加载图片...
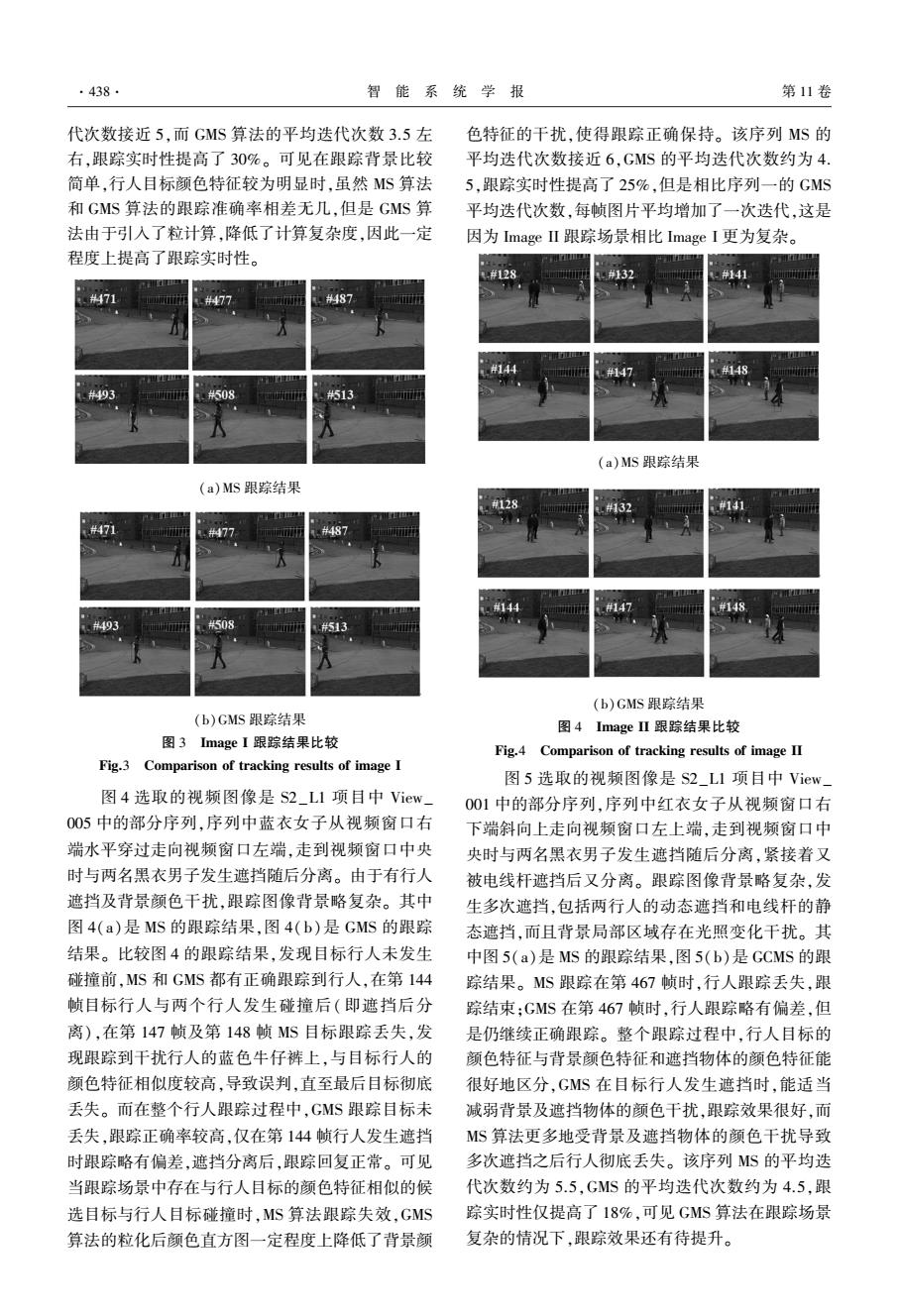
·438 智能系统学报 第11卷 代次数接近5,而GMS算法的平均迭代次数3.5左 色特征的干扰,使得跟踪正确保持。该序列MS的 右,跟踪实时性提高了30%。可见在跟踪背景比较 平均迭代次数接近6,GMS的平均迭代次数约为4. 简单,行人目标颜色特征较为明显时,虽然MS算法 5,跟踪实时性提高了25%,但是相比序列一的GMS 和GMS算法的跟踪准确率相差无几,但是GMS算 平均迭代次数,每帧图片平均增加了一次迭代,这是 法由于引入了粒计算,降低了计算复杂度,因此一定 因为ImageⅡ跟踪场景相比Image I更为复杂。 程度上提高了跟踪实时性。 #132 4471 #147 41R #513 (a)MS跟踪结果 (a)MS跟踪结果 47 种料77 #487 #144 14 #493 513 (b)GMS跟踪结果 (b)GMS跟踪结果 图4 ImageⅡ跟踪结果比较 图3 mage I跟踪结果比较 Fig.4 Comparison of tracking results of image II Fig.3 Comparison of tracking results of image I 图5选取的视频图像是S2Ll项目中View」 图4选取的视频图像是S2_Ll项目中View_ 001中的部分序列,序列中红衣女子从视频窗口右 005中的部分序列,序列中蓝衣女子从视频窗口右 下端斜向上走向视频窗口左上端,走到视频窗口中 端水平穿过走向视频窗口左端,走到视频窗口中央 央时与两名黑衣男子发生遮挡随后分离,紧接着又 时与两名黑衣男子发生遮挡随后分离。由于有行人 被电线杆遮挡后又分离。跟踪图像背景略复杂,发 遮挡及背景颜色干扰,跟踪图像背景略复杂。其中 生多次遮挡,包括两行人的动态遮挡和电线杆的静 图4(a)是MS的跟踪结果,图4(b)是GMS的跟踪 态遮挡,而且背景局部区域存在光照变化干扰。其 结果。比较图4的跟踪结果,发现目标行人未发生 中图5(a)是MS的跟踪结果,图5(b)是GCMS的跟 碰撞前,MS和GMS都有正确跟踪到行人,在第144 踪结果。MS跟踪在第467帧时,行人跟踪丢失,跟 帧目标行人与两个行人发生碰撞后(即遮挡后分 踪结束;GMS在第467帧时,行人跟踪略有偏差,但 离),在第147帧及第148帧MS目标跟踪丢失,发 是仍继续正确跟踪。整个跟踪过程中,行人目标的 现跟踪到干扰行人的蓝色牛仔裤上,与目标行人的 颜色特征与背景颜色特征和遮挡物体的颜色特征能 颜色特征相似度较高,导致误判,直至最后目标彻底 很好地区分,GMS在目标行人发生遮挡时,能适当 丢失。而在整个行人跟踪过程中,GMS跟踪目标未 减弱背景及遮挡物体的颜色干扰,跟踪效果很好,而 丢失,跟踪正确率较高,仅在第144帧行人发生遮挡 MS算法更多地受背景及遮挡物体的颜色干扰导致 时跟踪略有偏差,遮挡分离后,跟踪回复正常。可见 多次遮挡之后行人彻底丢失。该序列MS的平均迭 当跟踪场景中存在与行人目标的颜色特征相似的候 代次数约为5.5,GMS的平均迭代次数约为4.5,跟 选目标与行人目标碰撞时,MS算法跟踪失效,GMS 踪实时性仅提高了18%,可见GMS算法在跟踪场景 算法的粒化后颜色直方图一定程度上降低了背景颜 复杂的情况下,跟踪效果还有待提升。代次数接近 5,而 GMS 算法的平均迭代次数 3.5 左 右,跟踪实时性提高了 30%。 可见在跟踪背景比较 简单,行人目标颜色特征较为明显时,虽然 MS 算法 和 GMS 算法的跟踪准确率相差无几,但是 GMS 算 法由于引入了粒计算,降低了计算复杂度,因此一定 程度上提高了跟踪实时性。 (a)MS 跟踪结果 (b)GMS 跟踪结果 图 3 Image I 跟踪结果比较 Fig.3 Comparison of tracking results of image I 图 4 选取的视频图像是 S2_L1 项目中 View_ 005 中的部分序列,序列中蓝衣女子从视频窗口右 端水平穿过走向视频窗口左端,走到视频窗口中央 时与两名黑衣男子发生遮挡随后分离。 由于有行人 遮挡及背景颜色干扰,跟踪图像背景略复杂。 其中 图 4(a)是 MS 的跟踪结果,图 4( b)是 GMS 的跟踪 结果。 比较图 4 的跟踪结果,发现目标行人未发生 碰撞前,MS 和 GMS 都有正确跟踪到行人,在第 144 帧目标行人与两个行人发生碰撞后(即遮挡后分 离),在第 147 帧及第 148 帧 MS 目标跟踪丢失,发 现跟踪到干扰行人的蓝色牛仔裤上,与目标行人的 颜色特征相似度较高,导致误判,直至最后目标彻底 丢失。 而在整个行人跟踪过程中,GMS 跟踪目标未 丢失,跟踪正确率较高,仅在第 144 帧行人发生遮挡 时跟踪略有偏差,遮挡分离后,跟踪回复正常。 可见 当跟踪场景中存在与行人目标的颜色特征相似的候 选目标与行人目标碰撞时,MS 算法跟踪失效,GMS 算法的粒化后颜色直方图一定程度上降低了背景颜 色特征的干扰,使得跟踪正确保持。 该序列 MS 的 平均迭代次数接近 6,GMS 的平均迭代次数约为 4. 5,跟踪实时性提高了 25%,但是相比序列一的 GMS 平均迭代次数,每帧图片平均增加了一次迭代,这是 因为 Image II 跟踪场景相比 Image I 更为复杂。 (a)MS 跟踪结果 (b)GMS 跟踪结果 图 4 Image II 跟踪结果比较 Fig.4 Comparison of tracking results of image II 图 5 选取的视频图像是 S2_L1 项目中 View_ 001 中的部分序列,序列中红衣女子从视频窗口右 下端斜向上走向视频窗口左上端,走到视频窗口中 央时与两名黑衣男子发生遮挡随后分离,紧接着又 被电线杆遮挡后又分离。 跟踪图像背景略复杂,发 生多次遮挡,包括两行人的动态遮挡和电线杆的静 态遮挡,而且背景局部区域存在光照变化干扰。 其 中图 5(a)是 MS 的跟踪结果,图 5(b)是 GCMS 的跟 踪结果。 MS 跟踪在第 467 帧时,行人跟踪丢失,跟 踪结束;GMS 在第 467 帧时,行人跟踪略有偏差,但 是仍继续正确跟踪。 整个跟踪过程中,行人目标的 颜色特征与背景颜色特征和遮挡物体的颜色特征能 很好地区分,GMS 在目标行人发生遮挡时,能适当 减弱背景及遮挡物体的颜色干扰,跟踪效果很好,而 MS 算法更多地受背景及遮挡物体的颜色干扰导致 多次遮挡之后行人彻底丢失。 该序列 MS 的平均迭 代次数约为 5.5,GMS 的平均迭代次数约为 4.5,跟 踪实时性仅提高了 18%,可见 GMS 算法在跟踪场景 复杂的情况下,跟踪效果还有待提升。 ·438· 智 能 系 统 学 报 第 11 卷