正在加载图片...
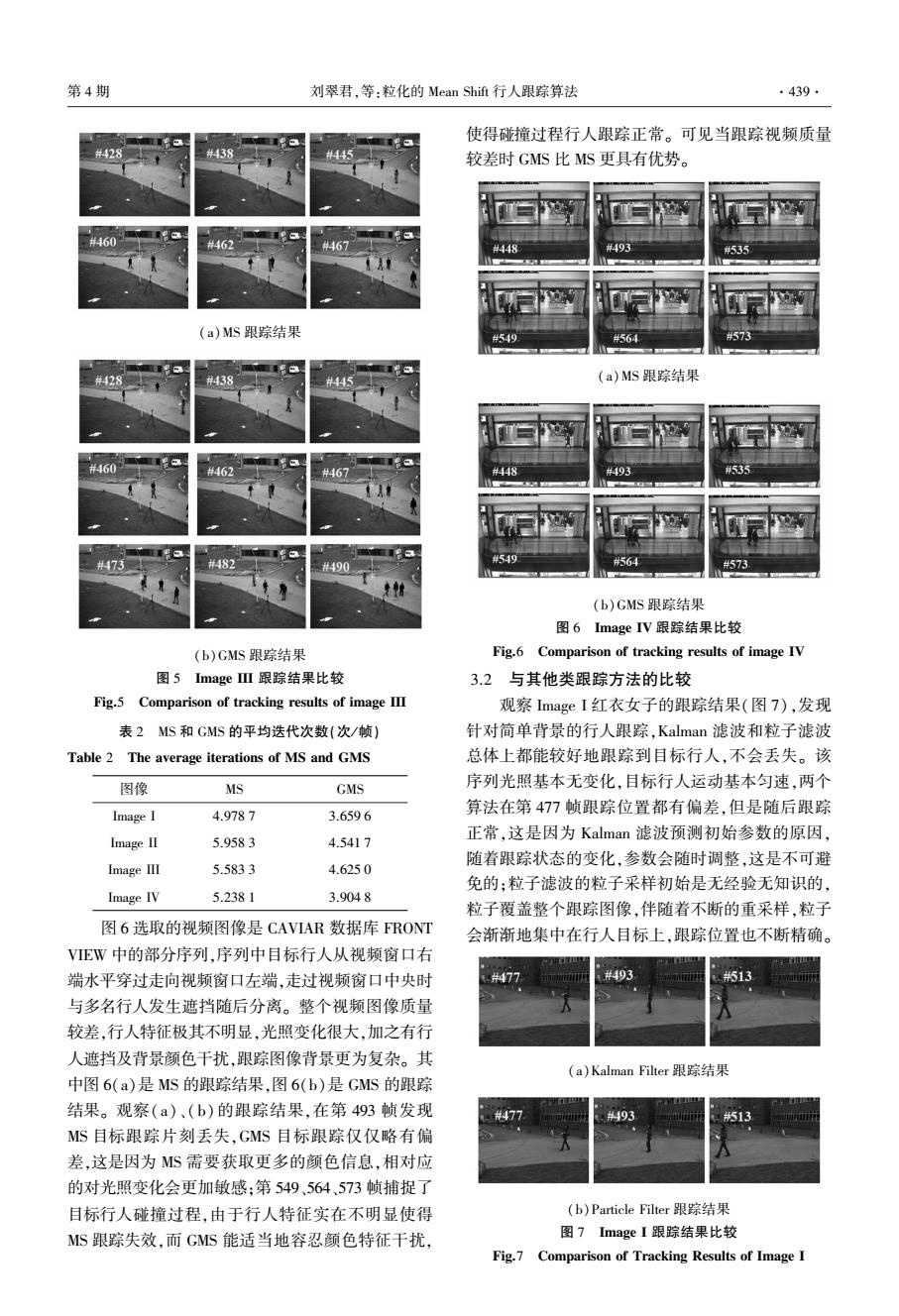
第4期 刘翠君,等:粒化的Mean Shift行人跟踪算法 ·439. 使得碰撞过程行人跟踪正常。可见当跟踪视频质量 #428 43 较差时GMS比MS更具有优势 6 #467 (a)MS跟踪结果 54 #564 (a)MS跟踪结果 #49人3 53 #473 #482 #490 #564 (b)GMS跟踪结果 图6 Image IV跟踪结果比较 (b)GMS跟踪结果 Fig.6 Comparison of tracking results of image IV 图5mageⅢ跟踪结果比较 3.2与其他类跟踪方法的比较 Fig.5 Comparison of tracking results of image III 观察Image I红衣女子的跟踪结果(图7),发现 表2MS和GMIS的平均迭代次数(次/帧) 针对简单背景的行人跟踪,Kalman滤波和粒子滤波 Table 2 The average iterations of MS and GMS 总体上都能较好地跟踪到目标行人,不会丢失。该 图像 MS GMS 序列光照基本无变化,目标行人运动基本匀速,两个 Image I 4.9787 3.6596 算法在第477帧跟踪位置都有偏差,但是随后跟踪 Image II 5.9583 4.5417 正常,这是因为Kalman滤波预测初始参数的原因, 随着跟踪状态的变化,参数会随时调整,这是不可避 Image IIl 5.5833 4.6250 免的:粒子滤波的粒子采样初始是无经验无知识的, Image IV 5.2381 3.9048 粒子覆盖整个跟踪图像,伴随着不断的重采样,粒子 图6选取的视频图像是CAVIAR数据库FRONT 会渐渐地集中在行人目标上,跟踪位置也不断精确。 VEW中的部分序列,序列中目标行人从视频窗口右 端水平穿过走向视频窗口左端,走过视频窗口中央时 #477 #493 #513 与多名行人发生遮挡随后分离。整个视频图像质量 较差,行人特征极其不明显,光照变化很大,加之有行 人遮挡及背景颜色干扰,跟踪图像背景更为复杂。其 (a)Kalman Filter跟踪结果 中图6(a)是MS的跟踪结果,图6(b)是GIS的跟踪 结果。观察(a)、(b)的跟踪结果,在第493帧发现 #477 493 513 MS目标跟踪片刻丢失,GMS目标跟踪仅仅略有偏 差,这是因为MS需要获取更多的颜色信息,相对应 的对光照变化会更加敏感:第549、564、573帧捕捉了 目标行人碰撞过程,由于行人特征实在不明显使得 (b)Particle Filter跟踪结果 MS跟踪失效,而GMS能适当地容忍颜色特征干扰, 图7 mage I跟踪结果比较 Fig.7 Comparison of Tracking Results of Image I(a)MS 跟踪结果 (b)GMS 跟踪结果 图 5 Image III 跟踪结果比较 Fig.5 Comparison of tracking results of image III 表 2 MS 和 GMS 的平均迭代次数(次/ 帧) Table 2 The average iterations of MS and GMS 图像 MS GMS Image I 4.978 7 3.659 6 Image II 5.958 3 4.541 7 Image III 5.583 3 4.625 0 Image IV 5.238 1 3.904 8 图 6 选取的视频图像是 CAVIAR 数据库 FRONT VIEW 中的部分序列,序列中目标行人从视频窗口右 端水平穿过走向视频窗口左端,走过视频窗口中央时 与多名行人发生遮挡随后分离。 整个视频图像质量 较差,行人特征极其不明显,光照变化很大,加之有行 人遮挡及背景颜色干扰,跟踪图像背景更为复杂。 其 中图 6(a)是 MS 的跟踪结果,图 6(b)是 GMS 的跟踪 结果。 观察(a)、(b)的跟踪结果,在第 493 帧发现 MS 目标跟踪片刻丢失,GMS 目标跟踪仅仅略有偏 差,这是因为 MS 需要获取更多的颜色信息,相对应 的对光照变化会更加敏感;第 549、564、573 帧捕捉了 目标行人碰撞过程,由于行人特征实在不明显使得 MS 跟踪失效,而 GMS 能适当地容忍颜色特征干扰, 使得碰撞过程行人跟踪正常。 可见当跟踪视频质量 较差时 GMS 比 MS 更具有优势。 (a)MS 跟踪结果 (b)GMS 跟踪结果 图 6 Image IV 跟踪结果比较 Fig.6 Comparison of tracking results of image IV 3.2 与其他类跟踪方法的比较 观察 Image I 红衣女子的跟踪结果(图 7),发现 针对简单背景的行人跟踪,Kalman 滤波和粒子滤波 总体上都能较好地跟踪到目标行人,不会丢失。 该 序列光照基本无变化,目标行人运动基本匀速,两个 算法在第 477 帧跟踪位置都有偏差,但是随后跟踪 正常,这是因为 Kalman 滤波预测初始参数的原因, 随着跟踪状态的变化,参数会随时调整,这是不可避 免的;粒子滤波的粒子采样初始是无经验无知识的, 粒子覆盖整个跟踪图像,伴随着不断的重采样,粒子 会渐渐地集中在行人目标上,跟踪位置也不断精确。 (a)Kalman Filter 跟踪结果 (b)Particle Filter 跟踪结果 图 7 Image I 跟踪结果比较 Fig.7 Comparison of Tracking Results of Image I 第 4 期 刘翠君,等:粒化的 Mean Shift 行人跟踪算法 ·439·