正在加载图片...
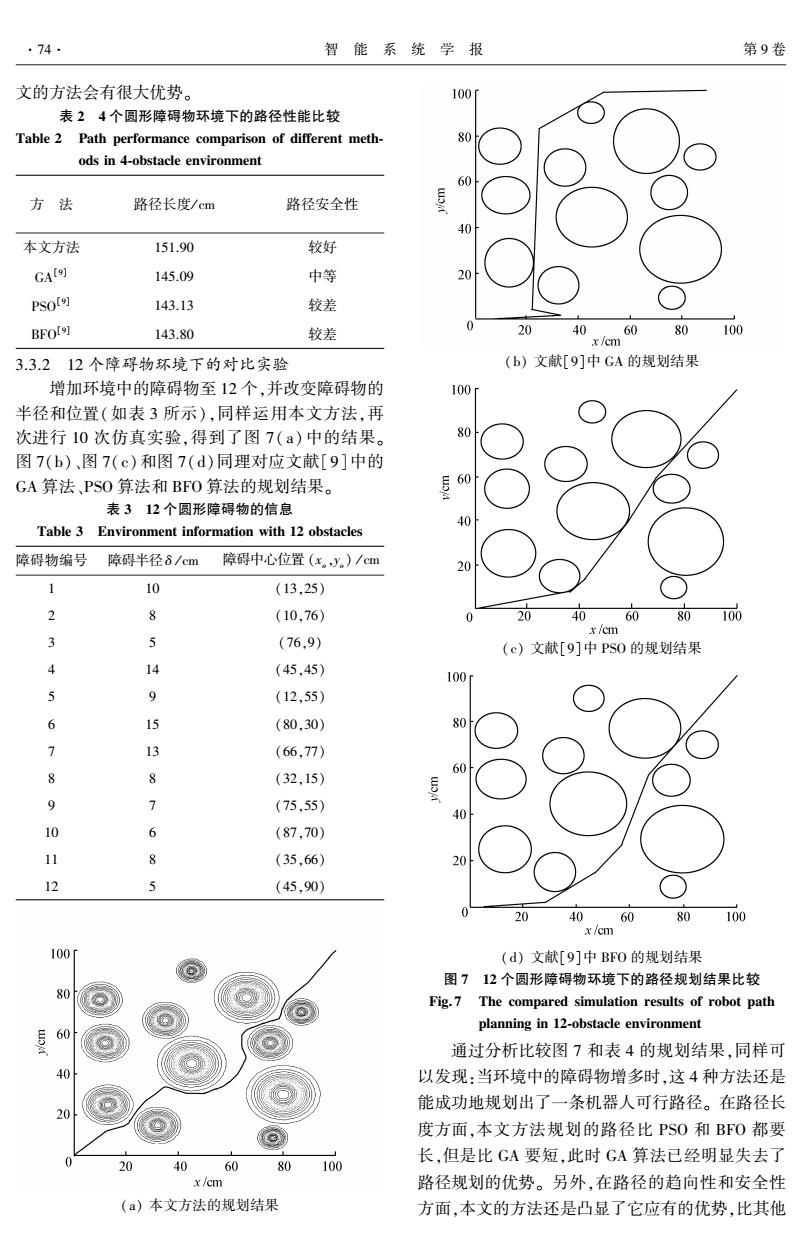
.74 智能系统学报 第9卷 文的方法会有很大优势。 100 表24个圆形障碍物环境下的路径性能比较 Table 2 Path performance comparison of different meth- 80 ods in 4-obstacle environment 60 方法 路径长度/cm 路径安全性 40 本文方法 151.90 较好 GAI] 145.09 中等 20 PSOt] 143.13 较差 BFOI9] 143.80 较差 20 40 6080 100 x/cm 3.3.212个障碍物环境下的对比实验 (b)文献[9]中GA的规划结果 增加环境中的障碍物至12个,并改变障碍物的 100 半径和位置(如表3所示),同样运用本文方法,再 次进行10次仿真实验,得到了图7(a)中的结果。 80 图7(b)、图7(c)和图7(d)同理对应文献[9]中的 GA算法、PSO算法和BFO算法的规划结果。 60 表312个圆形障碍物的信息 40 Table 3 Environment information with 12 obstacles 障碍物编号障碍半径δ/cm 障碍中心位置(x。水.)/cm 20 1 10 (13.25) 2 8 (10.76)》 20 40 6080 100 x/cm 3 (76.9) (c)文献[9]中PS0的规划结果 4 14 (45,45) 100 5 9 (12,55) 6 15 (80,30) 80 7 13 (66,77) 60 8 8 (32,15) 9 7 (75,55) 40 9 6 (87,70) 11 8 (35,66) 20 12 5 (45,90) 20 406080100 x/cm 100 (d)文献[9]中BFO的规划结果 图712个圆形障碍物环境下的路径规划结果比较 80 Fig.7 The compared simulation results of robot path planning in 12-obstacle environment 60 通过分析比较图7和表4的规划结果,同样可 以发现:当环境中的障碍物增多时,这4种方法还是 能成功地规划出了一条机器人可行路径。在路径长 20 度方面,本文方法规划的路径比PS0和BFO都要 长,但是比GA要短,此时GA算法已经明显失去了 20 4060 80 100 x/cm 路径规划的优势。另外,在路径的趋向性和安全性 (a)本文方法的规划结果 方面,本文的方法还是凸显了它应有的优势,比其他文的方法会有很大优势。 表 2 4 个圆形障碍物环境下的路径性能比较 Table 2 Path performance comparison of different meth⁃ ods in 4⁃obstacle environment 方 法 路径长度/ cm 路径安全性 本文方法 151.90 较好 GA [9] 145.09 中等 PSO [9] 143.13 较差 BFO [9] 143.80 较差 3.3.2 12 个障碍物环境下的对比实验 增加环境中的障碍物至 12 个,并改变障碍物的 半径和位置(如表 3 所示),同样运用本文方法,再 次进行 10 次仿真实验,得到了图 7( a) 中的结果。 图 7(b)、图 7(c)和图 7(d)同理对应文献[9]中的 GA 算法、PSO 算法和 BFO 算法的规划结果。 表 3 12 个圆形障碍物的信息 Table 3 Environment information with 12 obstacles 障碍物编号 障碍半径 δ / cm 障碍中心位置 (xo,yo) / cm 1 10 (13,25) 2 8 (10,76) 3 5 (76,9) 4 14 (45,45) 5 9 (12,55) 6 15 (80,30) 7 13 (66,77) 8 8 (32,15) 9 7 (75,55) 10 6 (87,70) 11 8 (35,66) 12 5 (45,90) (a) 本文方法的规划结果 (b) 文献[9]中 GA 的规划结果 (c) 文献[9]中 PSO 的规划结果 (d) 文献[9]中 BFO 的规划结果 图 7 12 个圆形障碍物环境下的路径规划结果比较 Fig. 7 The compared simulation results of robot path planning in 12⁃obstacle environment 通过分析比较图 7 和表 4 的规划结果,同样可 以发现:当环境中的障碍物增多时,这 4 种方法还是 能成功地规划出了一条机器人可行路径。 在路径长 度方面,本文方法规划的路径比 PSO 和 BFO 都要 长,但是比 GA 要短,此时 GA 算法已经明显失去了 路径规划的优势。 另外,在路径的趋向性和安全性 方面,本文的方法还是凸显了它应有的优势,比其他 ·74· 智 能 系 统 学 报 第 9 卷