正在加载图片...
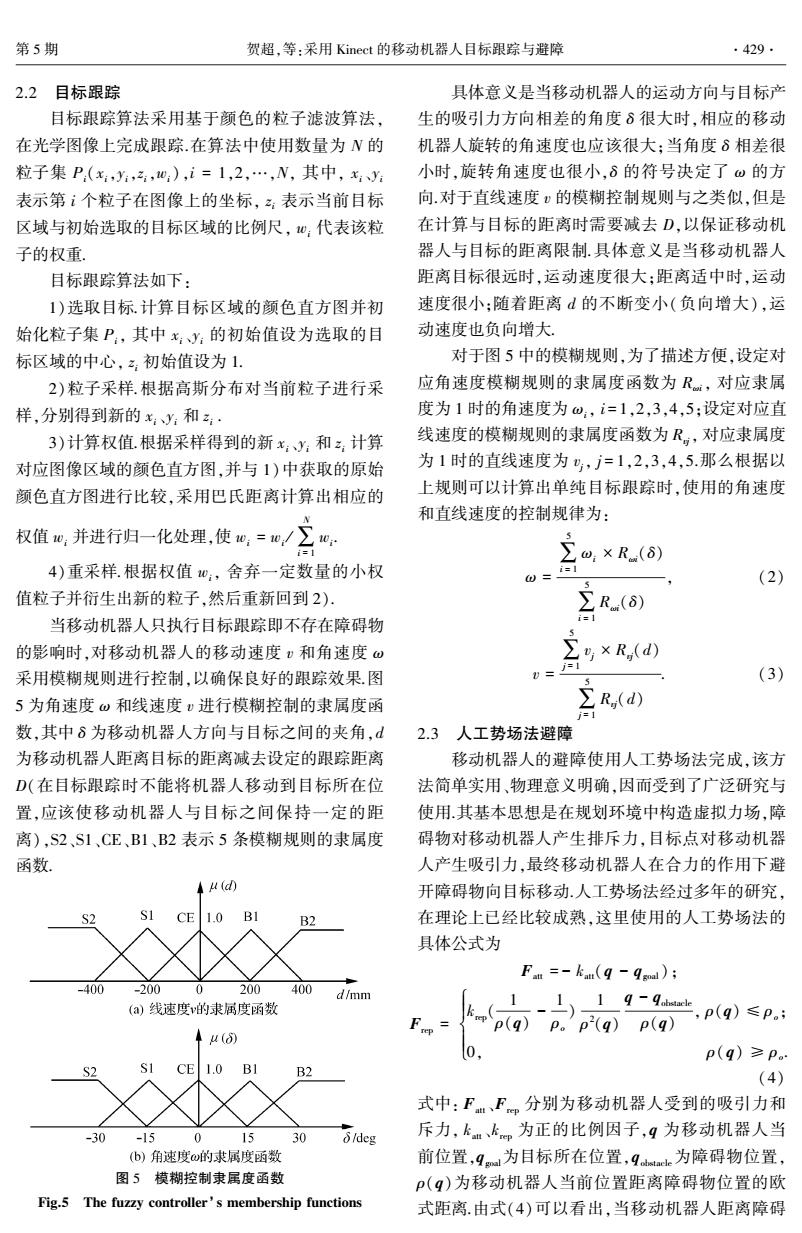
第5期 贺超,等:采用Kinect的移动机器人目标跟踪与避障 ·429 2.2目标跟踪 具体意义是当移动机器人的运动方向与目标产 目标跟踪算法采用基于颜色的粒子滤波算法, 生的吸引力方向相差的角度δ很大时,相应的移动 在光学图像上完成跟踪.在算法中使用数量为N的 机器人旋转的角速度也应该很大:当角度δ相差很 粒子集P.(xy,,),i=1,2,…,V,其中,xy 小时,旋转角速度也很小,δ的符号决定了ω的方 表示第i个粒子在图像上的坐标,:表示当前目标 向.对于直线速度v的模糊控制规则与之类似,但是 区域与初始选取的目标区域的比例尺,地:代表该粒 在计算与目标的距离时需要减去D,以保证移动机 子的权重. 器人与目标的距离限制.具体意义是当移动机器人 目标跟踪算法如下: 距离目标很远时,运动速度很大:距离适中时,运动 1)选取目标计算目标区域的颜色直方图并初 速度很小;随着距离d的不断变小(负向增大),运 始化粒子集P:,其中x:y:的初始值设为选取的目 动速度也负向增大 标区域的中心,:初始值设为1. 对于图5中的模糊规则,为了描述方便,设定对 2)粒子采样.根据高斯分布对当前粒子进行采 应角速度模糊规则的隶属度函数为R,对应隶属 样,分别得到新的xy:和· 度为1时的角速度为w,i=1,2,3,4,5;设定对应直 3)计算权值.根据采样得到的新x:y:和x,计算 线速度的模糊规则的隶属度函数为R,对应隶属度 对应图像区域的颜色直方图,并与1)中获取的原始 为1时的直线速度为,j=1,2,3,4,5.那么根据以 颜色直方图进行比较,采用巴氏距离计算出相应的 上规则可以计算出单纯目标跟踪时,使用的角速度 和直线速度的控制规律为: 权值0,并进行归一化处理,使0,=0,/∑, 5 4)重采样.根据权值e:,舍弃一定数量的小权 ∑u,×R() W= (2) 值粒子并衍生出新的粒子,然后重新回到2): R(6) 当移动机器人只执行目标跟踪即不存在障碍物 i=1 的影响时,对移动机器人的移动速度和角速度ω ,×Rd 采用模糊规则进行控制,以确保良好的跟踪效果.图 (3) 5为角速度ω和线速度v进行模糊控制的隶属度函 R,(d) i=1 数,其中δ为移动机器人方向与目标之间的夹角,d 2.3人工势场法避障 为移动机器人距离目标的距离减去设定的跟踪距离 移动机器人的避障使用人工势场法完成,该方 D(在目标跟踪时不能将机器人移动到目标所在位 法简单实用、物理意义明确,因而受到了广泛研究与 置,应该使移动机器人与目标之间保持一定的距 使用其基本思想是在规划环境中构造虚拟力场,障 离),S2、S1、CE、B1、B2表示5条模糊规则的隶属度 碍物对移动机器人产生排斥力,目标点对移动机器 函数 人产生吸引力,最终移动机器人在合力的作用下避 ◆u(cd 开障碍物向目标移动.人工势场法经过多年的研究, S2 S1 cE1.0 B2 在理论上已经比较成熟,这里使用的人工势场法的 具体公式为 Fm=-k(q-qsm): -400 -200 0 200400 d/mm (a)线速度的隶属度函数 k(-马)19-9 p(q)p.pi(q)p(q) ,p(q)≤p; u(6 0 p(q)≥P。 S2 CE 1.0 B1 B2 (4) 式中:F、F分别为移动机器人受到的吸引力和 -30 -15 0 15 30 δfdeg 斥力,kkp为正的比例因子,9为移动机器人当 (b)角速度ω的求属度函数 前位置,9m为目标所在位置,9为障碍物位置, 图5模糊控制隶属度函数 p(q)为移动机器人当前位置距离障碍物位置的欧 Fig.5 The fuzzy controller's membership functions 式距离.由式(4)可以看出,当移动机器人距离障碍2.2 目标跟踪 目标跟踪算法采用基于颜色的粒子滤波算法ꎬ 在光学图像上完成跟踪.在算法中使用数量为 N 的 粒子集 Pi(xiꎬyiꎬziꎬwi)ꎬi = 1ꎬ2ꎬꎬNꎬ 其中ꎬ xi、yi 表示第 i 个粒子在图像上的坐标ꎬ zi 表示当前目标 区域与初始选取的目标区域的比例尺ꎬ wi 代表该粒 子的权重. 目标跟踪算法如下: 1)选取目标.计算目标区域的颜色直方图并初 始化粒子集 Piꎬ 其中 xi、yi 的初始值设为选取的目 标区域的中心ꎬ zi 初始值设为 1. 2)粒子采样.根据高斯分布对当前粒子进行采 样ꎬ分别得到新的 xi、yi 和 zi . 3)计算权值.根据采样得到的新 xi、yi 和 zi 计算 对应图像区域的颜色直方图ꎬ并与 1)中获取的原始 颜色直方图进行比较ꎬ采用巴氏距离计算出相应的 权值 wi 并进行归一化处理ꎬ使 wi = wi /∑ N i = 1 wi . 4)重采样.根据权值 wiꎬ 舍弃一定数量的小权 值粒子并衍生出新的粒子ꎬ然后重新回到 2). 当移动机器人只执行目标跟踪即不存在障碍物 的影响时ꎬ对移动机器人的移动速度 v 和角速度 ω 采用模糊规则进行控制ꎬ以确保良好的跟踪效果.图 5 为角速度 ω 和线速度 v 进行模糊控制的隶属度函 数ꎬ其中 δ 为移动机器人方向与目标之间的夹角ꎬd 为移动机器人距离目标的距离减去设定的跟踪距离 D(在目标跟踪时不能将机器人移动到目标所在位 置ꎬ应该使移动机器人与目标之间保持一定的距 离)ꎬS2、S1、CE、B1、B2 表示 5 条模糊规则的隶属度 函数. 图 5 模糊控制隶属度函数 Fig.5 The fuzzy controller’s membership functions 具体意义是当移动机器人的运动方向与目标产 生的吸引力方向相差的角度 δ 很大时ꎬ相应的移动 机器人旋转的角速度也应该很大ꎻ当角度 δ 相差很 小时ꎬ旋转角速度也很小ꎬδ 的符号决定了 ω 的方 向.对于直线速度 v 的模糊控制规则与之类似ꎬ但是 在计算与目标的距离时需要减去 Dꎬ以保证移动机 器人与目标的距离限制.具体意义是当移动机器人 距离目标很远时ꎬ运动速度很大ꎻ距离适中时ꎬ运动 速度很小ꎻ随着距离 d 的不断变小(负向增大)ꎬ运 动速度也负向增大. 对于图 5 中的模糊规则ꎬ为了描述方便ꎬ设定对 应角速度模糊规则的隶属度函数为 Rωiꎬ 对应隶属 度为 1 时的角速度为 ωiꎬ i = 1ꎬ2ꎬ3ꎬ4ꎬ5ꎻ设定对应直 线速度的模糊规则的隶属度函数为 Rvjꎬ 对应隶属度 为 1 时的直线速度为 vjꎬ j = 1ꎬ2ꎬ3ꎬ4ꎬ5.那么根据以 上规则可以计算出单纯目标跟踪时ꎬ使用的角速度 和直线速度的控制规律为: ω = ∑ 5 i = 1 ωi × Rωi(δ) ∑ 5 i = 1 Rωi(δ) ꎬ (2) v = ∑ 5 j = 1 vj × Rvj(d) ∑ 5 j = 1 Rvj(d) . (3) 2.3 人工势场法避障 移动机器人的避障使用人工势场法完成ꎬ该方 法简单实用、物理意义明确ꎬ因而受到了广泛研究与 使用.其基本思想是在规划环境中构造虚拟力场ꎬ障 碍物对移动机器人产生排斥力ꎬ目标点对移动机器 人产生吸引力ꎬ最终移动机器人在合力的作用下避 开障碍物向目标移动.人工势场法经过多年的研究ꎬ 在理论上已经比较成熟ꎬ这里使用的人工势场法的 具体公式为 Fatt = - katt(q - qgoal)ꎻ Frep = krep( 1 ρ(q) - 1 ρo ) 1 ρ 2 (q) q - qobstacle ρ(q) ꎬ ρ(q) ≤ ρoꎻ 0ꎬ ρ(q) ≥ ρo . ì î í ï ï ïï (4) 式中: Fatt、Frep 分别为移动机器人受到的吸引力和 斥力ꎬ katt、krep 为正的比例因子ꎬq 为移动机器人当 前位置ꎬqgoal为目标所在位置ꎬqobstacle为障碍物位置ꎬ ρ(q)为移动机器人当前位置距离障碍物位置的欧 式距离.由式(4)可以看出ꎬ当移动机器人距离障碍 第 5 期 贺超ꎬ等:采用 Kinect 的移动机器人目标跟踪与避障 429