正在加载图片...
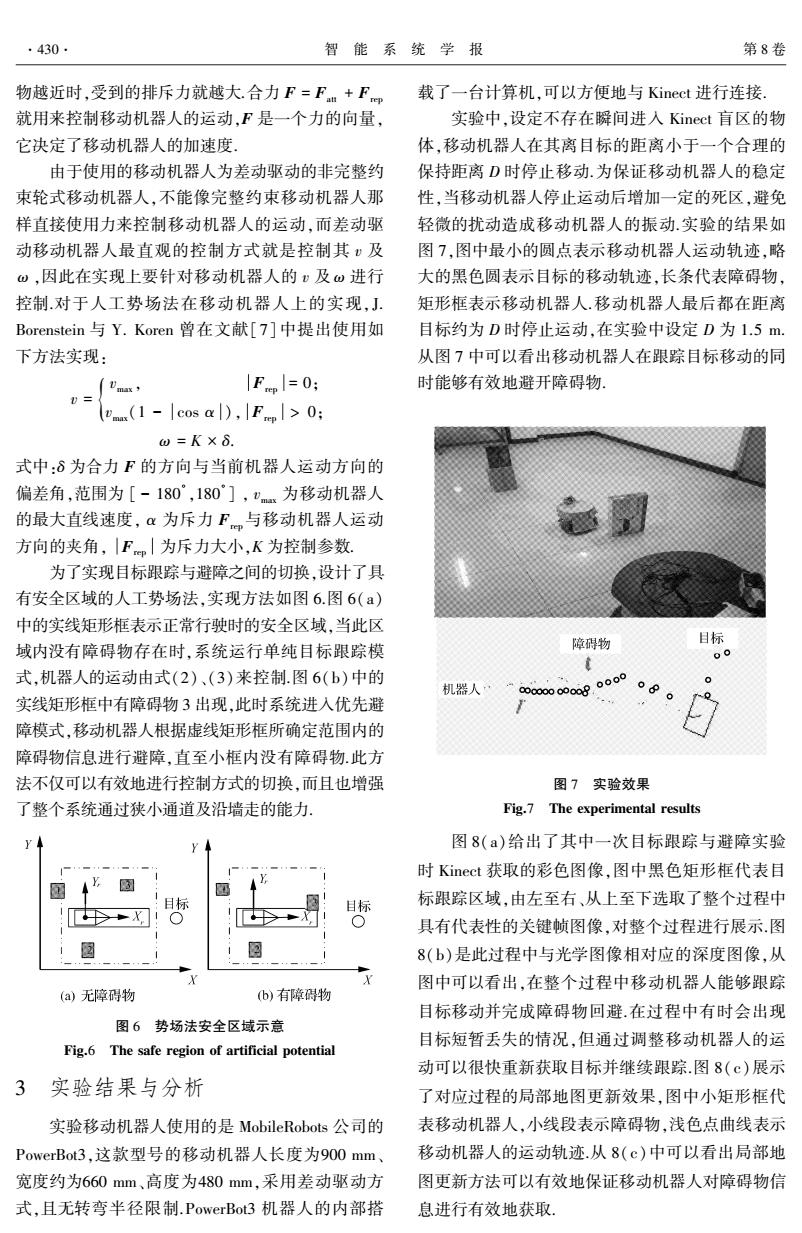
·430· 智能系统学报 第8卷 物越近时,受到的排斥力就越大合力F=F+Fp 载了一台计算机,可以方便地与Kinect进行连接。 就用来控制移动机器人的运动,F是一个力的向量, 实验中,设定不存在瞬间进入Kinect盲区的物 它决定了移动机器人的加速度. 体,移动机器人在其离目标的距离小于一个合理的 由于使用的移动机器人为差动驱动的非完整约 保持距离D时停止移动.为保证移动机器人的稳定 束轮式移动机器人,不能像完整约束移动机器人那 性,当移动机器人停止运动后增加一定的死区,避免 样直接使用力来控制移动机器人的运动,而差动驱 轻微的扰动造成移动机器人的振动.实验的结果如 动移动机器人最直观的控制方式就是控制其:及 图7,图中最小的圆点表示移动机器人运动轨迹,略 。,因此在实现上要针对移动机器人的:及ω进行 大的黑色圆表示目标的移动轨迹,长条代表障碍物, 控制对于人工势场法在移动机器人上的实现,J. 矩形框表示移动机器人.移动机器人最后都在距离 Borenstein与Y.Koren曾在文献[7]中提出使用如 目标约为D时停止运动,在实验中设定D为1.5m. 下方法实现: 从图7中可以看出移动机器人在跟踪目标移动的同 |Fp=0; 时能够有效地避开障碍物. D= m(1-Icos al),IF>0; W =K X 5. 式中:δ为合力F的方向与当前机器人运动方向的 偏差角,范围为[-180°,180门,v为移动机器人 的最大直线速度,α为斥力F,与移动机器人运动 方向的夹角,|F|为斥力大小,K为控制参数 为了实现目标跟踪与避障之间的切换,设计了具 有安全区域的人工势场法,实现方法如图6.图6(a) 中的实线矩形框表示正常行驶时的安全区域,当此区 域内没有障碍物存在时,系统运行单纯目标跟踪模 障碍物 目标 00 式,机器人的运动由式(2)、(3)来控制.图6(b)中的 机器人… 0og0oo° 实线矩形框中有障碍物3出现,此时系统进入优先避 障模式,移动机器人根据虚线矩形框所确定范围内的 障碍物信息进行避障,直至小框内没有障碍物.此方 法不仅可以有效地进行控制方式的切换,而且也增强 图7实验效果 了整个系统通过狭小通道及沿墙走的能力. Fig.7 The experimental results 图8(a)给出了其中一次目标跟踪与避障实验 时Kinect获取的彩色图像,图中黑色矩形框代表目 目标 目标 标跟踪区域,由左至右、从上至下选取了整个过程中 X 具有代表性的关键帧图像,对整个过程进行展示.图 回 8(b)是此过程中与光学图像相对应的深度图像,从 图中可以看出,在整个过程中移动机器人能够跟踪 (a)无障碍物 (b)有障碍物 目标移动并完成障碍物回避.在过程中有时会出现 图6势场法安全区域示意 目标短暂丢失的情况,但通过调整移动机器人的运 Fig.6 The safe region of artificial potential 动可以很快重新获取目标并继续跟踪图8(©)展示 3 实验结果与分析 了对应过程的局部地图更新效果,图中小矩形框代 实验移动机器人使用的是MobileRobots公司的 表移动机器人,小线段表示障碍物,浅色点曲线表示 PowerBot.3,这款型号的移动机器人长度为900mm、 移动机器人的运动轨迹.从8(c)中可以看出局部地 宽度约为660mm、高度为480mm,采用差动驱动方 图更新方法可以有效地保证移动机器人对障碍物信 式,且无转弯半径限制.PowerBot3.机器人的内部搭 息进行有效地获取.物越近时ꎬ受到的排斥力就越大.合力 F = Fatt + Frep 就用来控制移动机器人的运动ꎬF 是一个力的向量ꎬ 它决定了移动机器人的加速度. 由于使用的移动机器人为差动驱动的非完整约 束轮式移动机器人ꎬ不能像完整约束移动机器人那 样直接使用力来控制移动机器人的运动ꎬ而差动驱 动移动机器人最直观的控制方式就是控制其 v 及 ω ꎬ因此在实现上要针对移动机器人的 v 及ω 进行 控制.对于人工势场法在移动机器人上的实现ꎬJ. Borenstein 与 Y. Koren 曾在文献[7] 中提出使用如 下方法实现: v = vmaxꎬ Frep = 0ꎻ v{ max(1 - cos α )ꎬ Frep > 0ꎻ ω = K × δ. 式中:δ 为合力 F 的方向与当前机器人运动方向的 偏差角ꎬ范围为 [ - 180 ° ꎬ180 ° ] ꎬ vmax 为移动机器人 的最大直线速度ꎬ α 为斥力 Frep与移动机器人运动 方向的夹角ꎬ Frep 为斥力大小ꎬK 为控制参数. 为了实现目标跟踪与避障之间的切换ꎬ设计了具 有安全区域的人工势场法ꎬ实现方法如图 6.图 6(a) 中的实线矩形框表示正常行驶时的安全区域ꎬ当此区 域内没有障碍物存在时ꎬ系统运行单纯目标跟踪模 式ꎬ机器人的运动由式(2)、(3)来控制.图 6(b)中的 实线矩形框中有障碍物 3 出现ꎬ此时系统进入优先避 障模式ꎬ移动机器人根据虚线矩形框所确定范围内的 障碍物信息进行避障ꎬ直至小框内没有障碍物.此方 法不仅可以有效地进行控制方式的切换ꎬ而且也增强 了整个系统通过狭小通道及沿墙走的能力. 图 6 势场法安全区域示意 Fig.6 The safe region of artificial potential 3 实验结果与分析 实验移动机器人使用的是 MobileRobots 公司的 PowerBot3ꎬ这款型号的移动机器人长度为900 mm、 宽度约为660 mm、高度为480 mmꎬ采用差动驱动方 式ꎬ且无转弯半径限制.PowerBot3 机器人的内部搭 载了一台计算机ꎬ可以方便地与 Kinect 进行连接. 实验中ꎬ设定不存在瞬间进入 Kinect 盲区的物 体ꎬ移动机器人在其离目标的距离小于一个合理的 保持距离 D 时停止移动.为保证移动机器人的稳定 性ꎬ当移动机器人停止运动后增加一定的死区ꎬ避免 轻微的扰动造成移动机器人的振动.实验的结果如 图 7ꎬ图中最小的圆点表示移动机器人运动轨迹ꎬ略 大的黑色圆表示目标的移动轨迹ꎬ长条代表障碍物ꎬ 矩形框表示移动机器人.移动机器人最后都在距离 目标约为 D 时停止运动ꎬ在实验中设定 D 为 1.5 m. 从图 7 中可以看出移动机器人在跟踪目标移动的同 时能够有效地避开障碍物. 图 7 实验效果 Fig.7 The experimental results 图 8(a)给出了其中一次目标跟踪与避障实验 时 Kinect 获取的彩色图像ꎬ图中黑色矩形框代表目 标跟踪区域ꎬ由左至右、从上至下选取了整个过程中 具有代表性的关键帧图像ꎬ对整个过程进行展示.图 8(b)是此过程中与光学图像相对应的深度图像ꎬ从 图中可以看出ꎬ在整个过程中移动机器人能够跟踪 目标移动并完成障碍物回避.在过程中有时会出现 目标短暂丢失的情况ꎬ但通过调整移动机器人的运 动可以很快重新获取目标并继续跟踪.图 8(c)展示 了对应过程的局部地图更新效果ꎬ图中小矩形框代 表移动机器人ꎬ小线段表示障碍物ꎬ浅色点曲线表示 移动机器人的运动轨迹.从 8(c)中可以看出局部地 图更新方法可以有效地保证移动机器人对障碍物信 息进行有效地获取. 430 智 能 系 统 学 报 第 8 卷