正在加载图片...
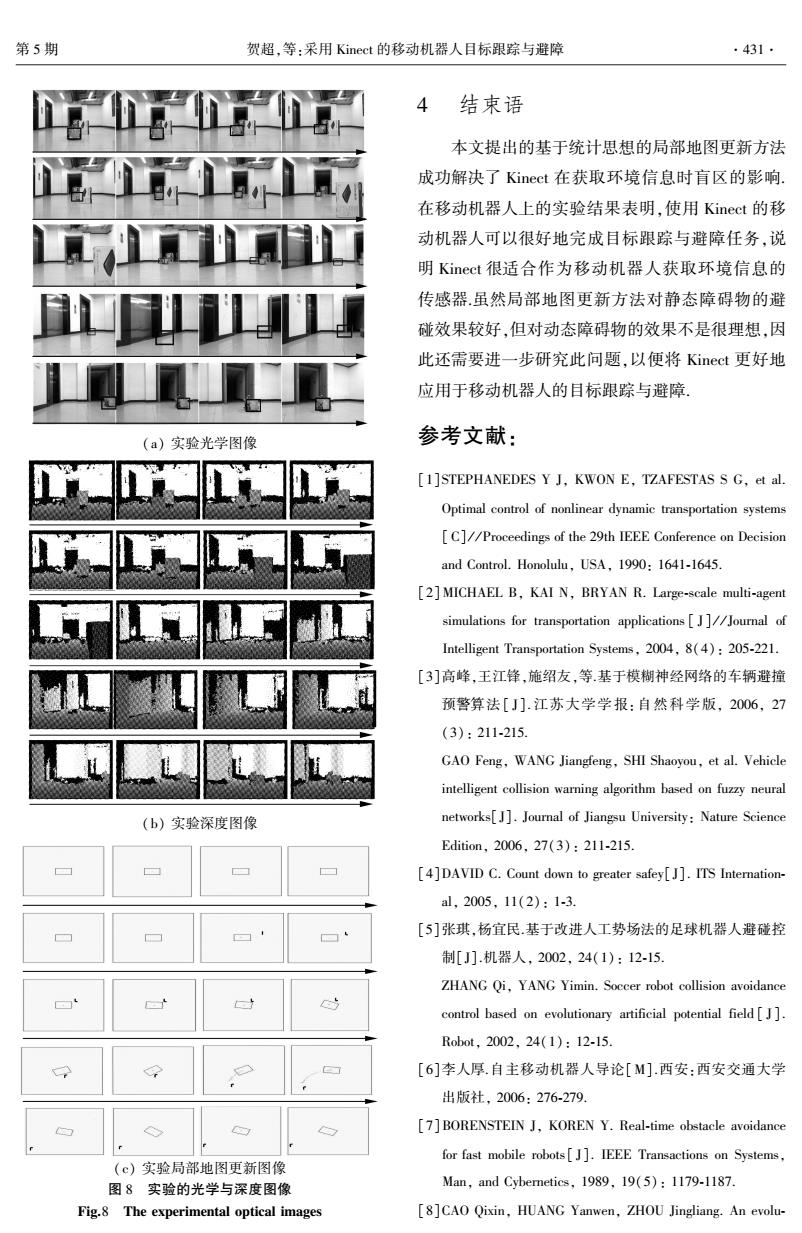
第5期 贺超,等:采用Kinect的移动机器人目标跟踪与避障 ·431· 4 结束语 本文提出的基于统计思想的局部地图更新方法 成功解决了Kinect在获取环境信息时盲区的影响. 在移动机器人上的实验结果表明,使用Kinect的移 动机器人可以很好地完成目标跟踪与避障任务,说 明Kinect很适合作为移动机器人获取环境信息的 传感器.虽然局部地图更新方法对静态障碍物的避 碰效果较好,但对动态障碍物的效果不是很理想,因 此还需要进一步研究此问题,以便将Kinect更好地 应用于移动机器人的目标跟踪与避障。 (a)实验光学图像 参考文献: [1]STEPHANEDES Y J,KWON E,TZAFESTAS S G,et al. Optimal control of nonlinear dynamic transportation systems [C]//Proceedings of the 29th IEEE Conference on Decision and Control.Honolulu,USA,1990:1641-1645. [2]MICHAEL B,KAI N,BRYAN R.Large-scale multi-agent simulations for transportation applications[J]//Journal of Intelligent Transportation Systems,2004,8(4):205-221. [3]高峰,王江锋,施绍友,等.基于模糊神经网络的车辆避撞 预警算法[J].江苏大学学报:自然科学版,2006,27 (3):211-215 GAO Feng,WANG Jiangfeng,SHI Shaoyou,et al.Vehicle intelligent collision warning algorithm based on fuzzy neural (b)实验深度图像 networks[J].Journal of Jiangsu University:Nature Science Edition,2006,27(3):211-215 [4]DAVID C.Count down to greater safey[J].ITS Internation- al,2005,11(2):1-3. [5]张琪,杨宜民基于改进人工势场法的足球机器人避碰控 制[J].机器人,2002,24(1):12-15. ZHANG Qi,YANG Yimin.Soccer robot collision avoidance 回' 甘 control based on evolutionary artificial potential field[J]. Robot,2002,24(1):12-15. 2 [6]李人厚.自主移动机器人导论[M]西安:西安交通大学 出版社,2006:276-279. [7]BORENSTEIN J,KOREN Y.Real-time obstacle avoidance for fast mobile robots[J].IEEE Transactions on Systems, (©)实验局部地图更新图像 图8实验的光学与深度图像 Man,and Cybernetics,1989,19(5):1179-1187. Fig.8 The experimental optical images [8]CAO Qixin,HUANG Yanwen,ZHOU Jingliang.An evolu-(a) 实验光学图像 (b) 实验深度图像 (c) 实验局部地图更新图像 图 8 实验的光学与深度图像 Fig.8 The experimental optical images 4 结束语 本文提出的基于统计思想的局部地图更新方法 成功解决了 Kinect 在获取环境信息时盲区的影响. 在移动机器人上的实验结果表明ꎬ使用 Kinect 的移 动机器人可以很好地完成目标跟踪与避障任务ꎬ说 明 Kinect 很适合作为移动机器人获取环境信息的 传感器.虽然局部地图更新方法对静态障碍物的避 碰效果较好ꎬ但对动态障碍物的效果不是很理想ꎬ因 此还需要进一步研究此问题ꎬ以便将 Kinect 更好地 应用于移动机器人的目标跟踪与避障. 参考文献: [1]STEPHANEDES Y Jꎬ KWON Eꎬ TZAFESTAS S Gꎬ et al. Optimal control of nonlinear dynamic transportation systems [C] / / Proceedings of the 29th IEEE Conference on Decision and Control. Honoluluꎬ USAꎬ 1990: 1641 ̄1645. [2] MICHAEL Bꎬ KAI Nꎬ BRYAN R. Large ̄scale multi ̄agent simulations for transportation applications [ J] / / Journal of Intelligent Transportation Systemsꎬ 2004ꎬ 8(4): 205 ̄221. [3]高峰ꎬ王江锋ꎬ施绍友ꎬ等.基于模糊神经网络的车辆避撞 预警算法[ J]. 江苏大学学报:自然科学版ꎬ 2006ꎬ 27 (3): 211 ̄215. GAO Fengꎬ WANG Jiangfengꎬ SHI Shaoyouꎬ et al. Vehicle intelligent collision warning algorithm based on fuzzy neural networks[J]. Journal of Jiangsu University: Nature Science Editionꎬ 2006ꎬ 27(3): 211 ̄215. [4]DAVID C. Count down to greater safey[J]. ITS Internation ̄ alꎬ 2005ꎬ 11(2): 1 ̄3. [5]张琪ꎬ杨宜民.基于改进人工势场法的足球机器人避碰控 制[J].机器人ꎬ 2002ꎬ 24(1): 12 ̄15. ZHANG Qiꎬ YANG Yimin. Soccer robot collision avoidance control based on evolutionary artificial potential field [ J]. Robotꎬ 2002ꎬ 24(1): 12 ̄15. [6]李人厚.自主移动机器人导论[M].西安:西安交通大学 出版社ꎬ 2006: 276 ̄279. [7]BORENSTEIN Jꎬ KOREN Y. Real ̄time obstacle avoidance for fast mobile robots[ J]. IEEE Transactions on Systemsꎬ Manꎬ and Cyberneticsꎬ 1989ꎬ 19(5): 1179 ̄1187. [8]CAO Qixinꎬ HUANG Yanwenꎬ ZHOU Jingliang. An evolu ̄ 第 5 期 贺超ꎬ等:采用 Kinect 的移动机器人目标跟踪与避障 431